
1.1 Kataloog projekti salvestamiseks. Kataloogi nime formaat on soovituslikult yyy_mm_dd.
{kind=link}
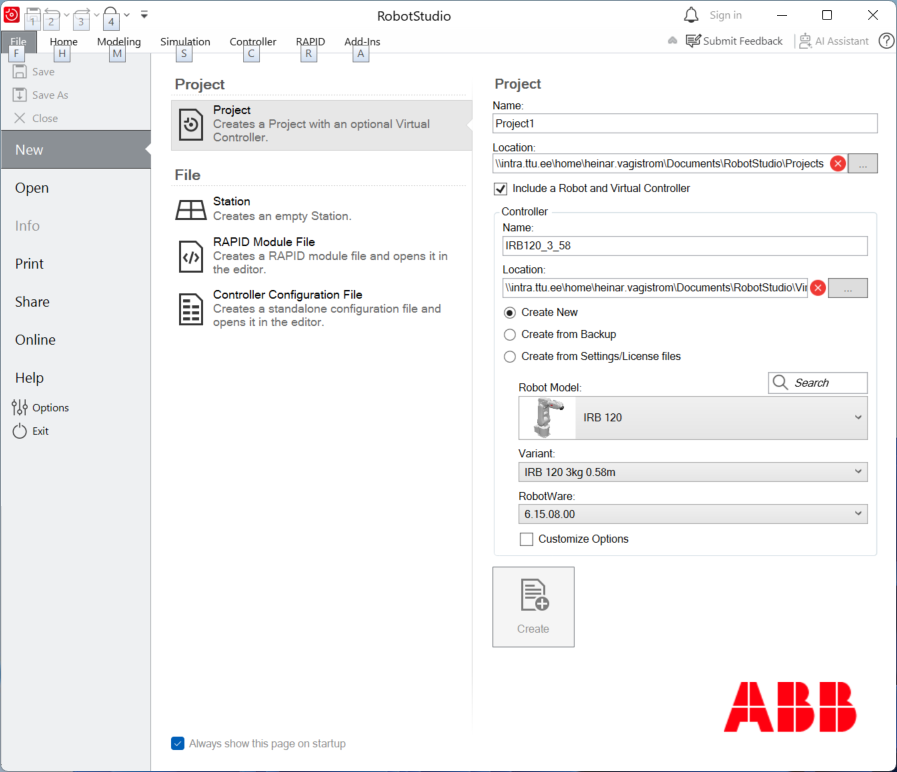
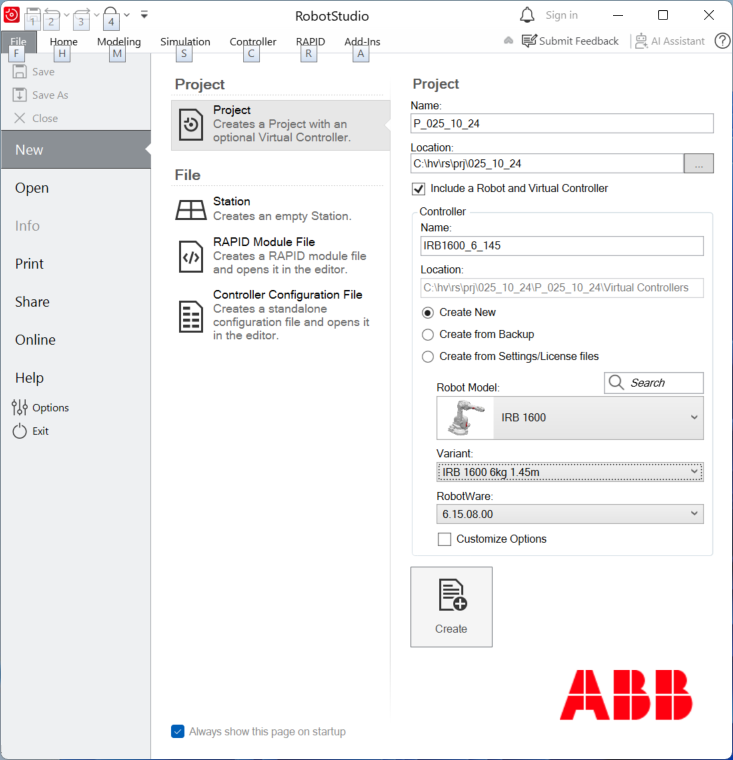
1.2 Rakenduse RobotStudio avaleht. Tädetakse väljad ‘Name’, ‘Location’, ‘Controller’, ‘RobotModel’, ‘Variant’, ‘RobotWare’. Vajutatakse nuppu ‘Create’.
Väljade väärtused:
{kind=link}
| Nr | Välja nimi | Soovitatav väärtus | Selgitus |
| 1 | Name | P_025_10_24 | Projekti nimi |
| 2 | Location | …/rs/prj/025_10_24 | Projekti kataloog |
| 3 | Controller | IRB1600_6_145 | |
| 4 | RobotModel | IRB1600 | |
| 5 | Variant | IRB 1600 6kg 1.45m | |
| 6 | RobotWare | 6.15.08.00 |
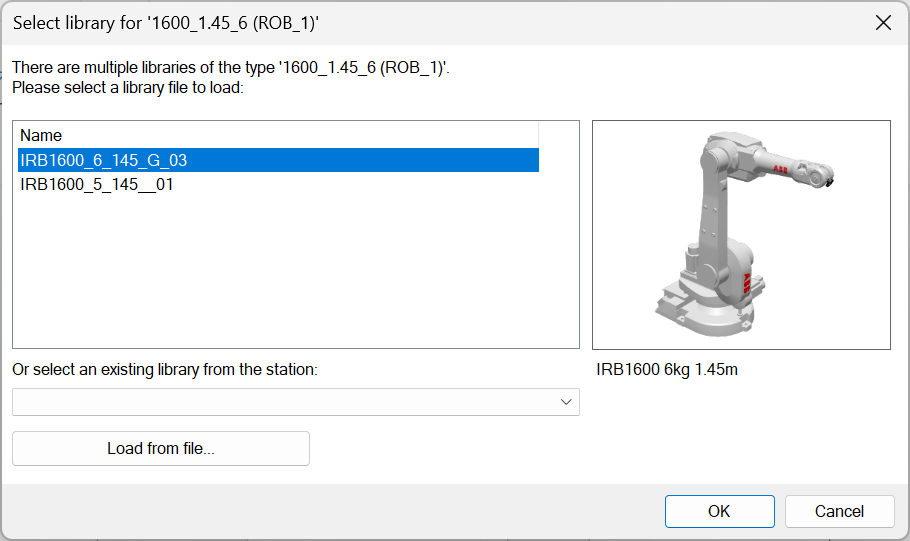
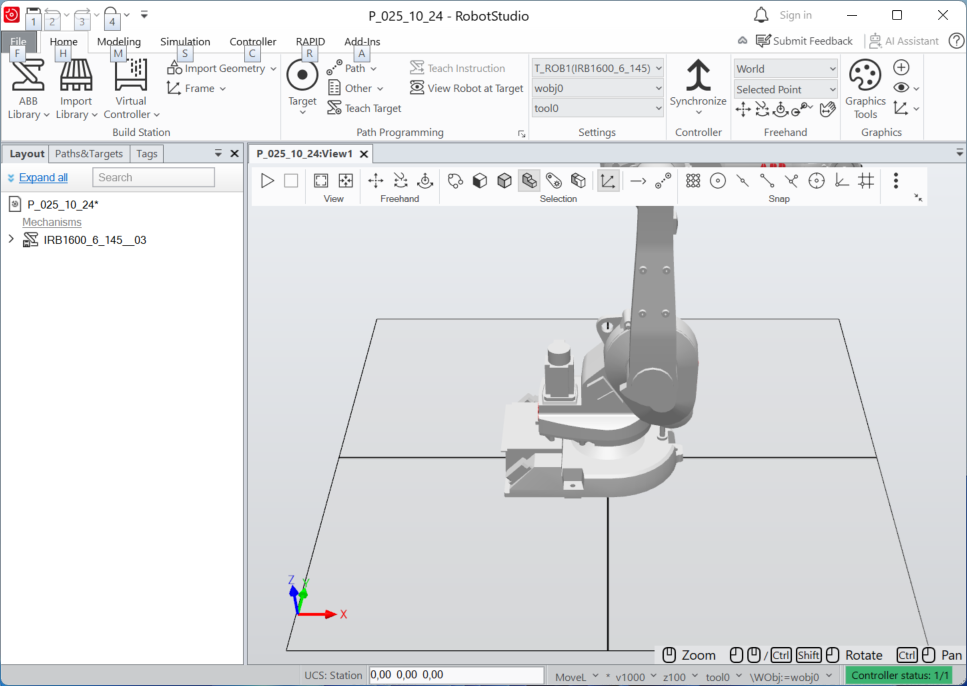
Täidetud avaleht. Pärast nupu ‘Create’ vajutamist valitakse library. Valitakse IRB1600_6_145_G_03. Pärast library valimist on projekti koostamine tehtud.
Lehe all paremas servas on rohelisel taustal kiri ‘Controller status: 1/1’.
{kind=link}
{kind=link}
{kind=link}
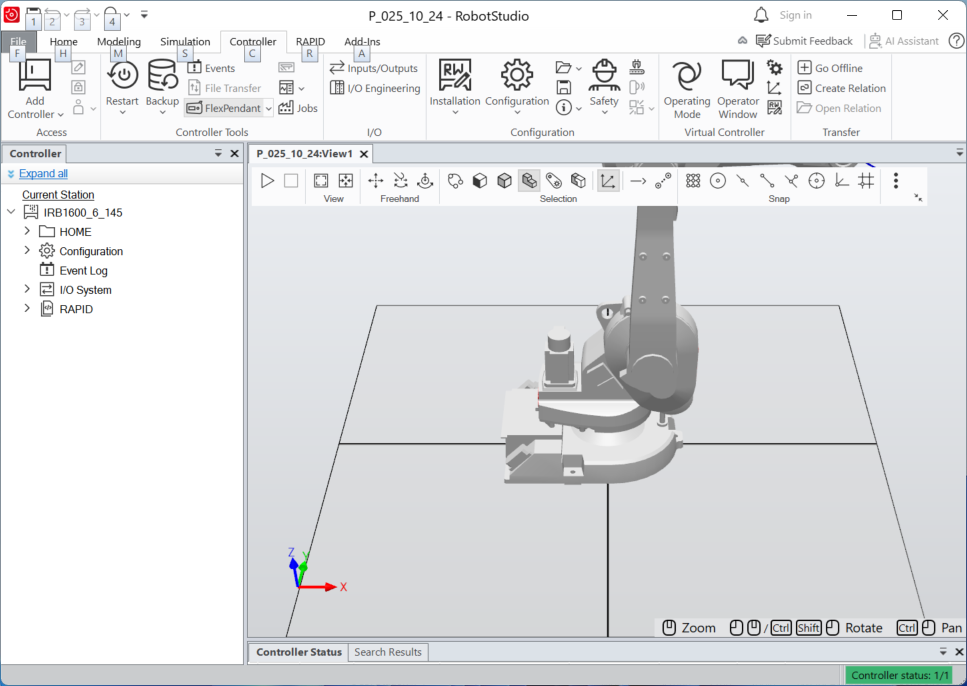
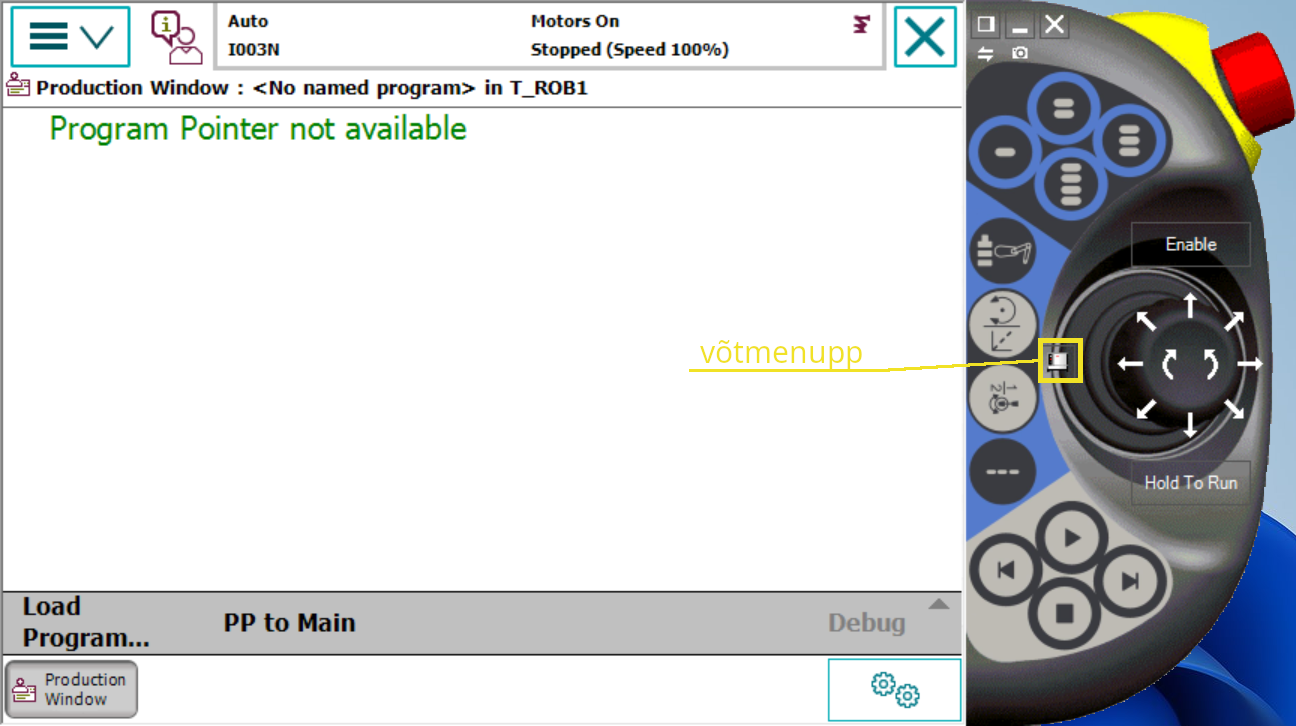
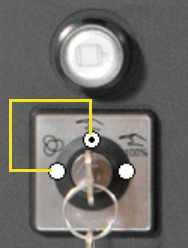
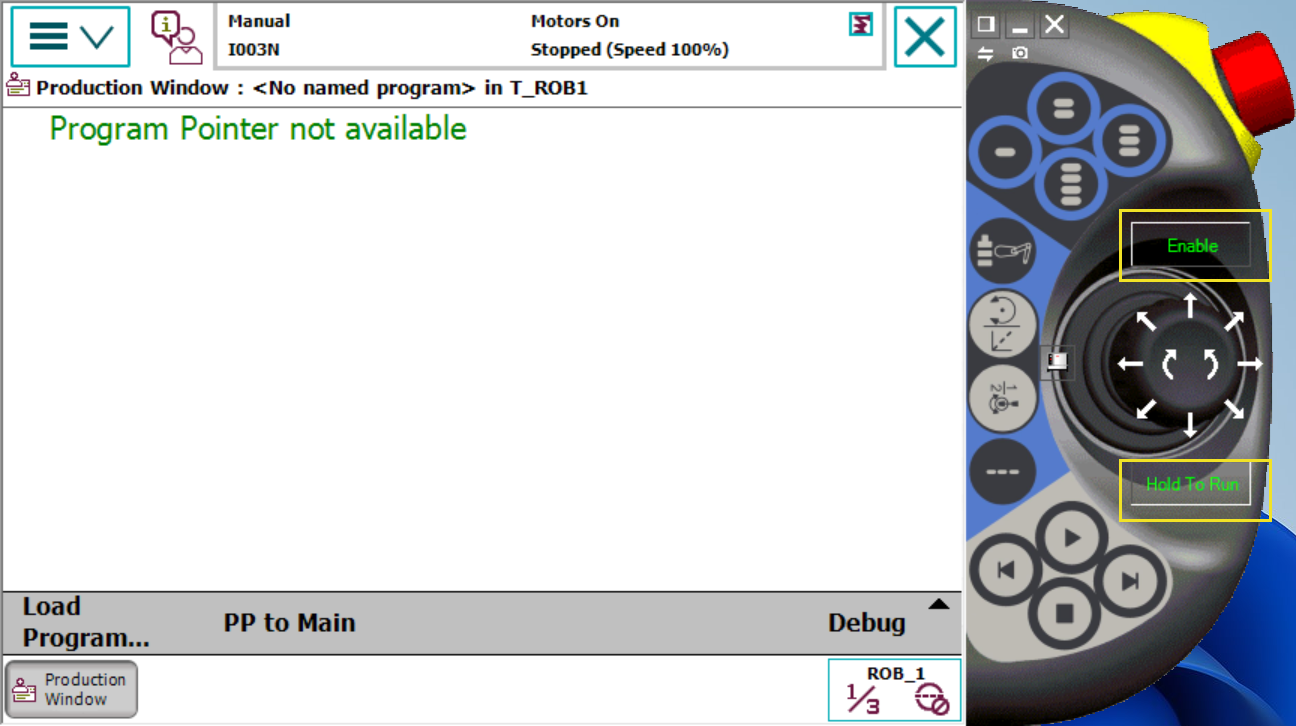
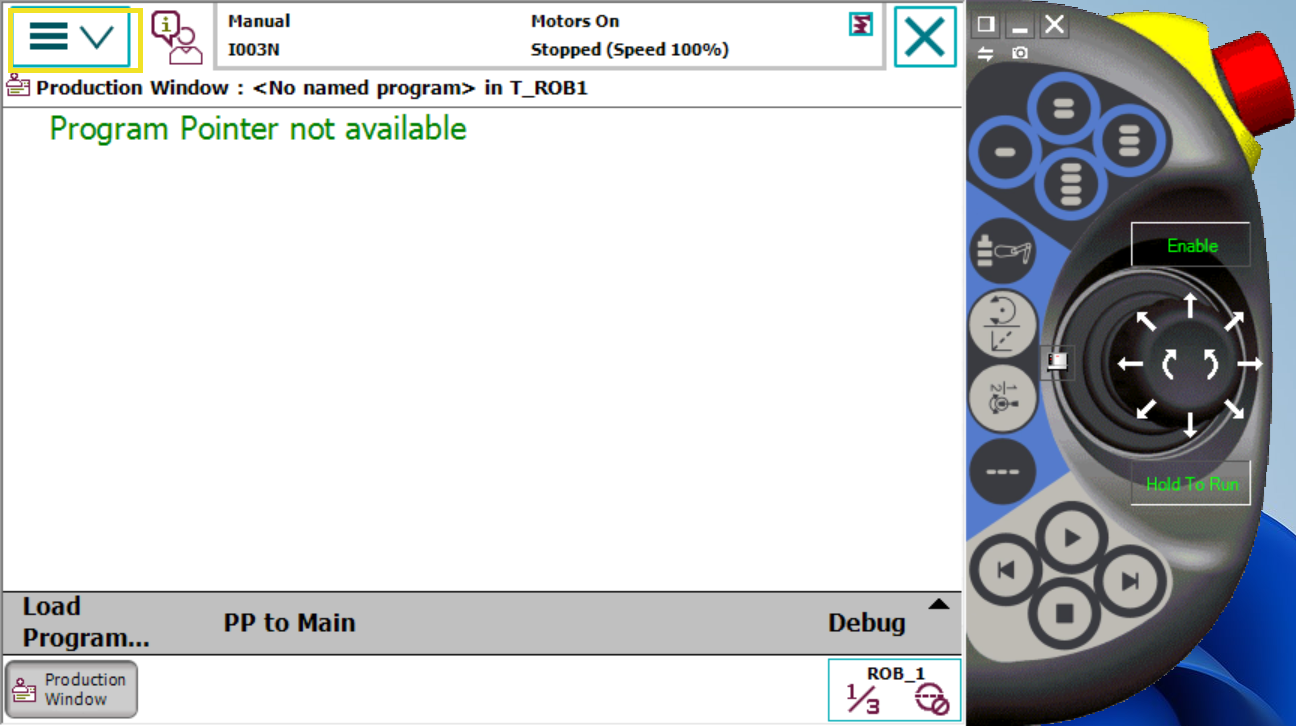
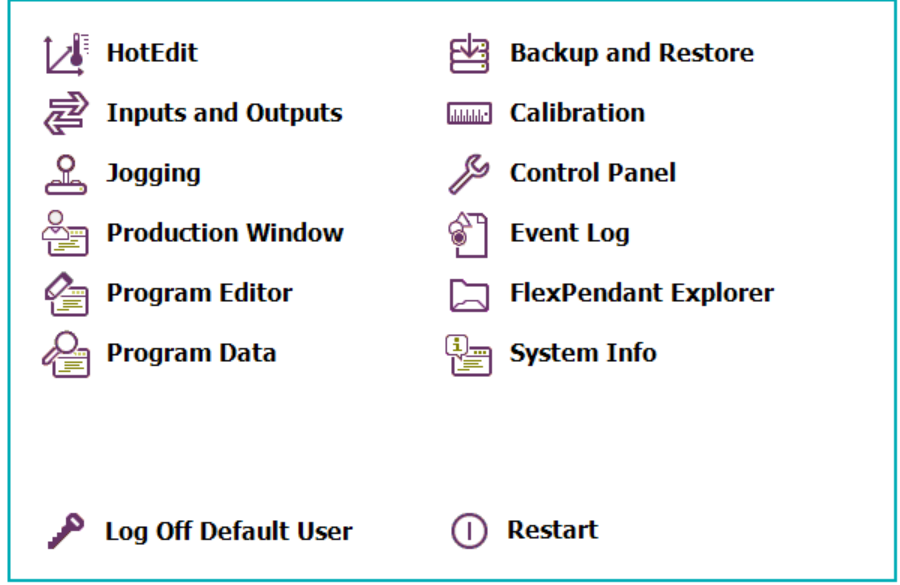
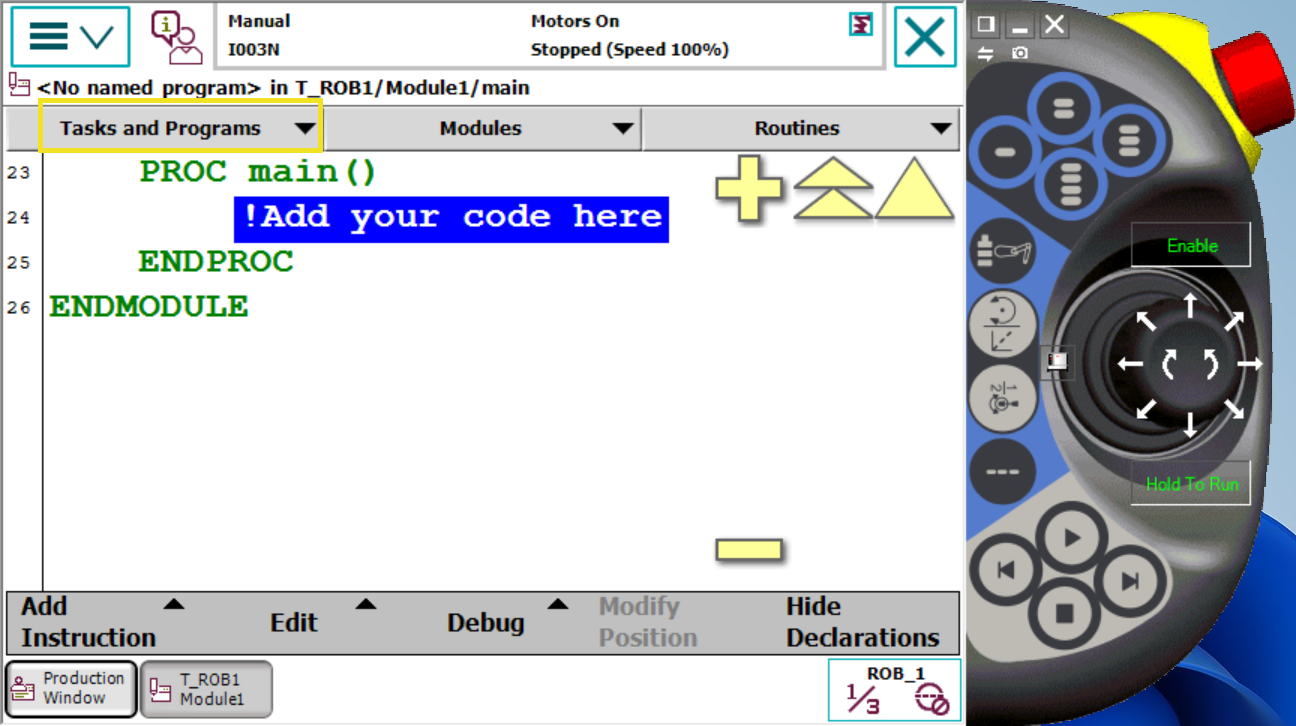
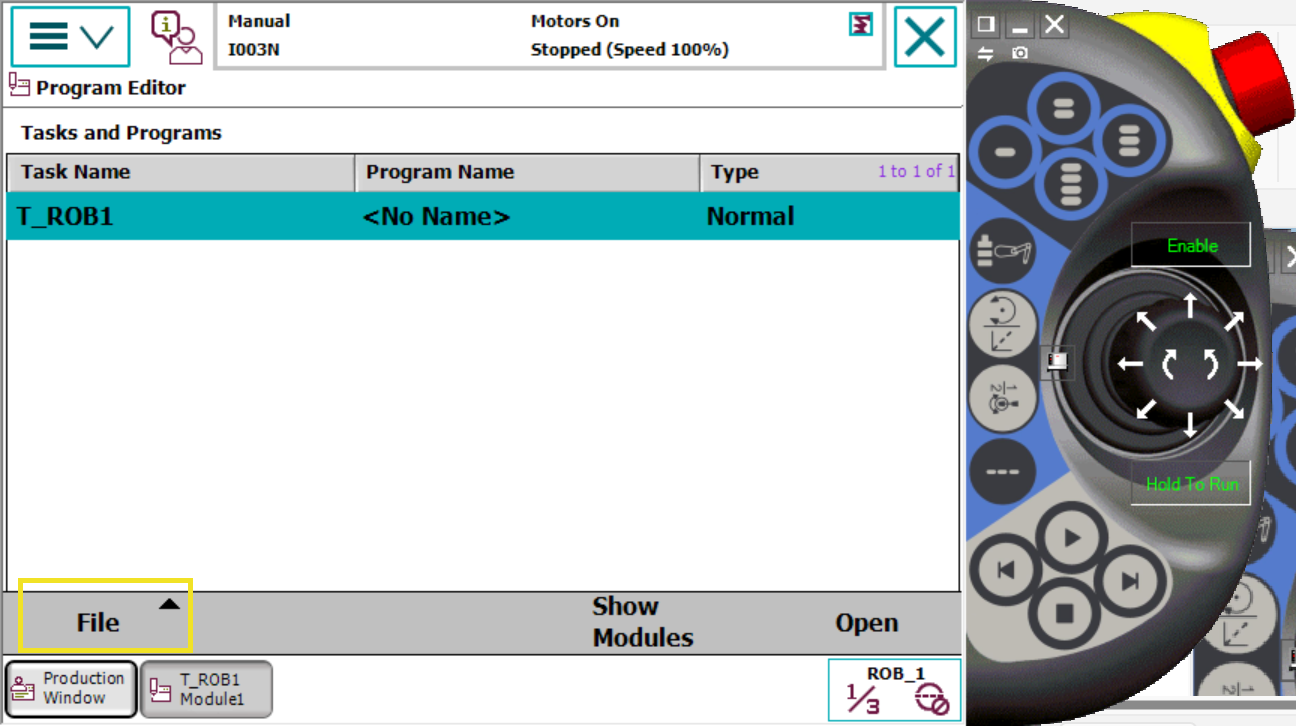
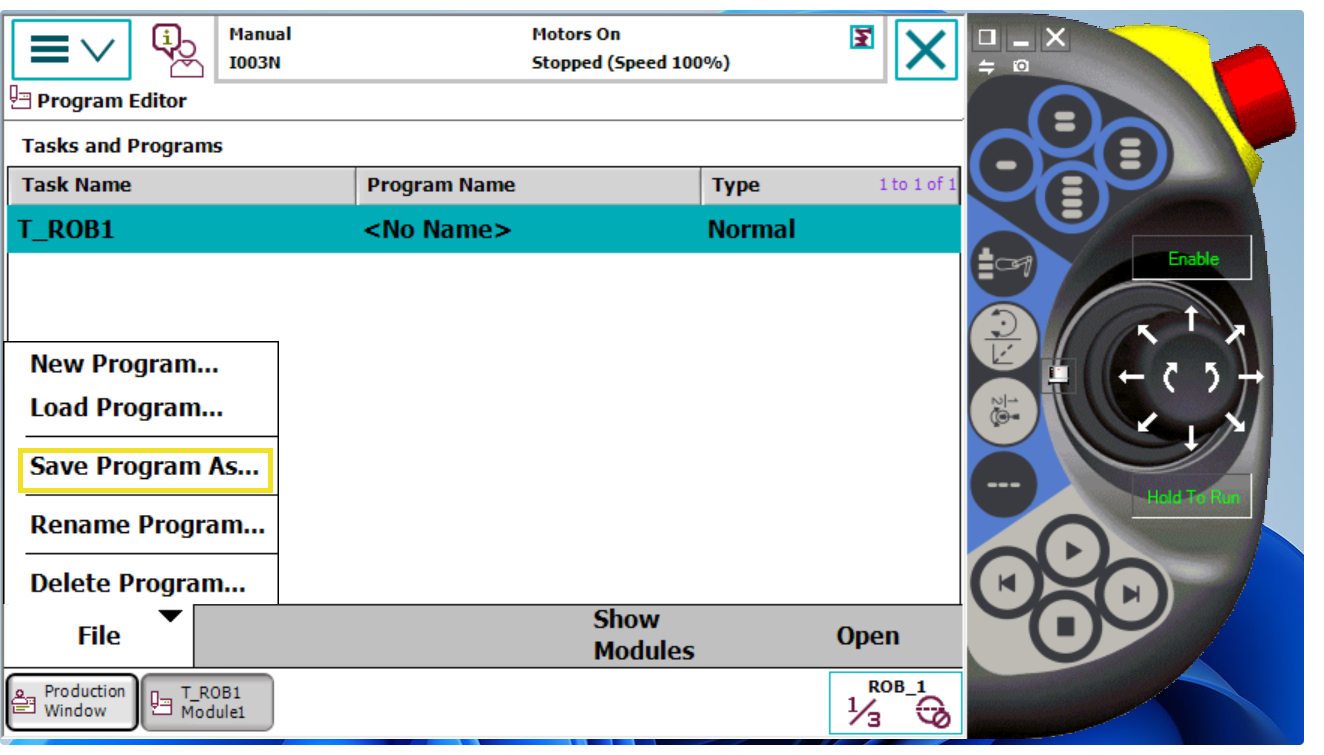
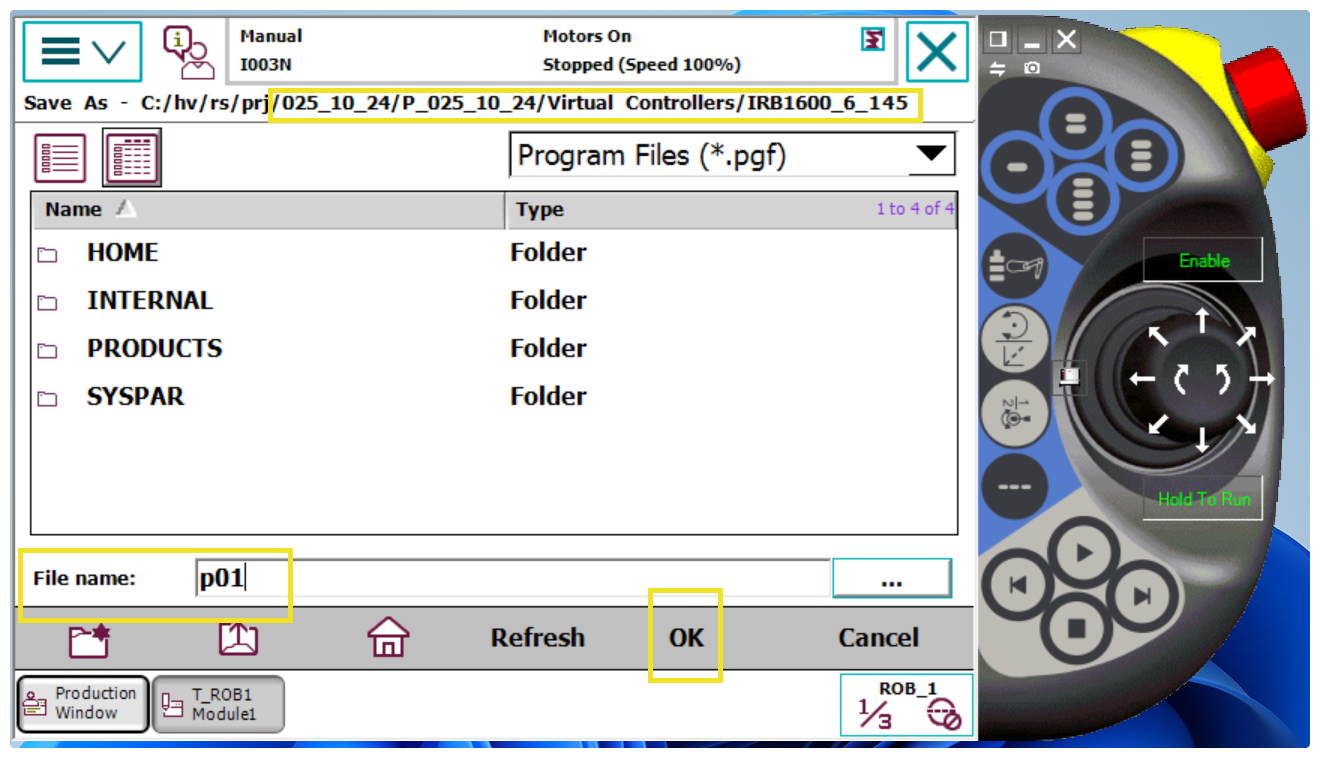
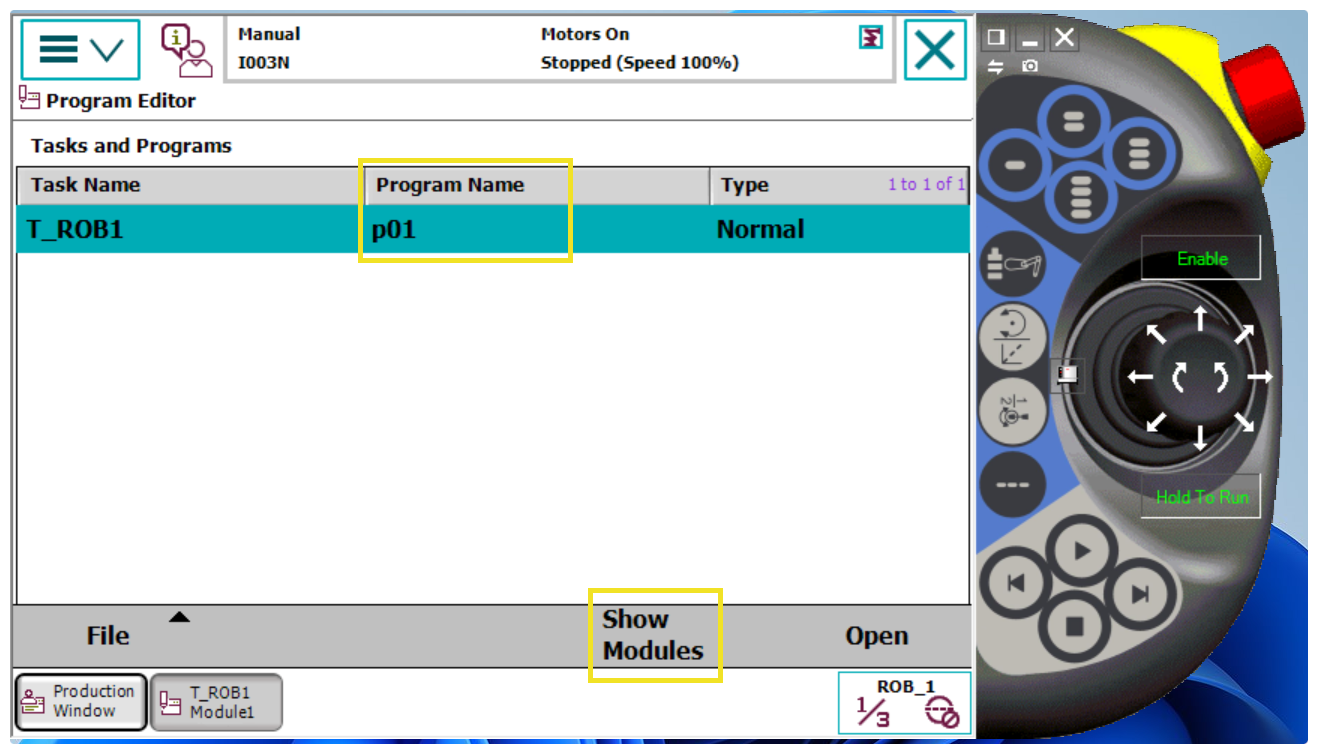
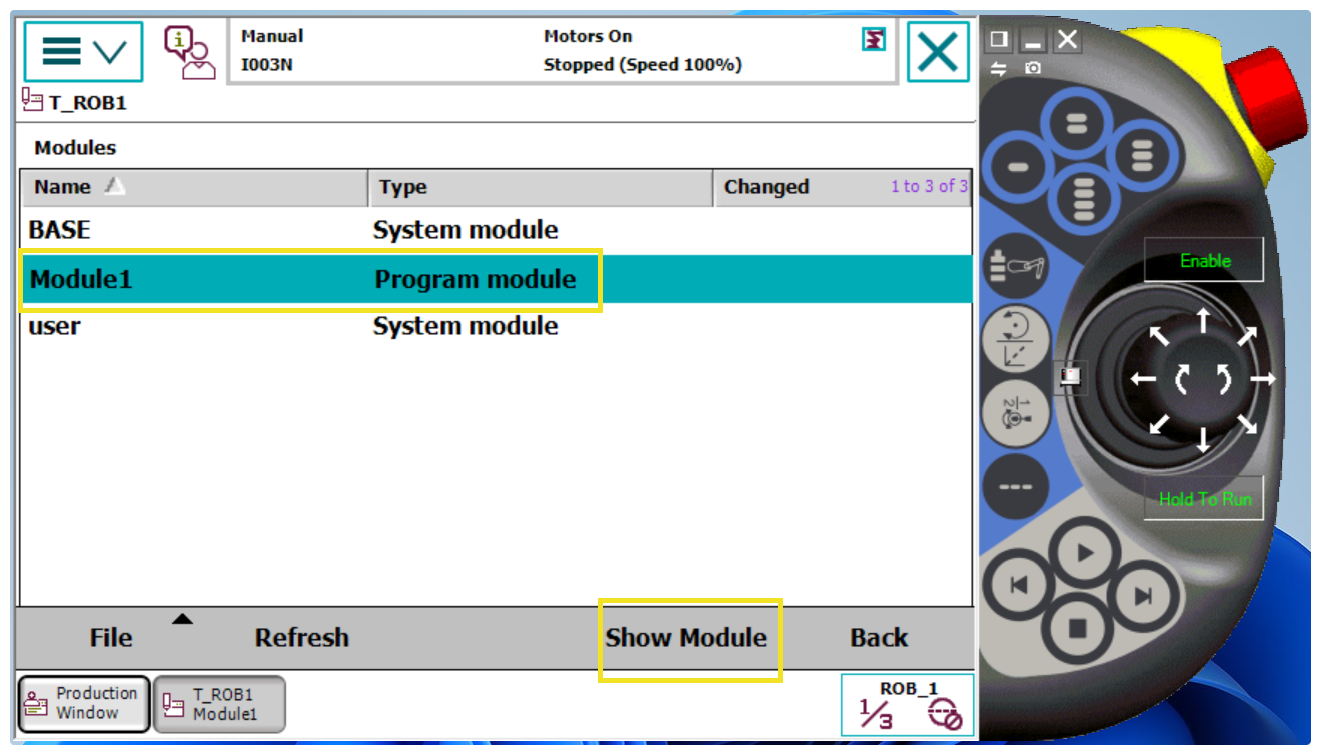
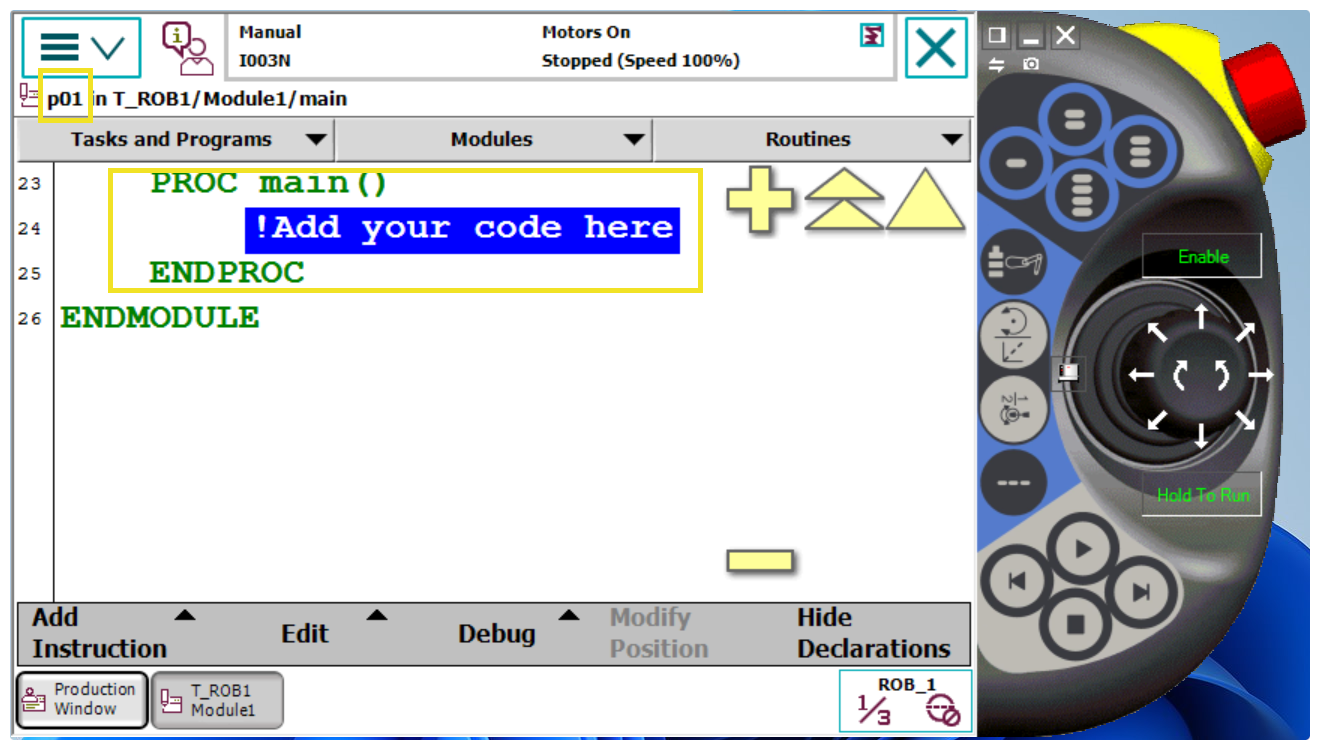
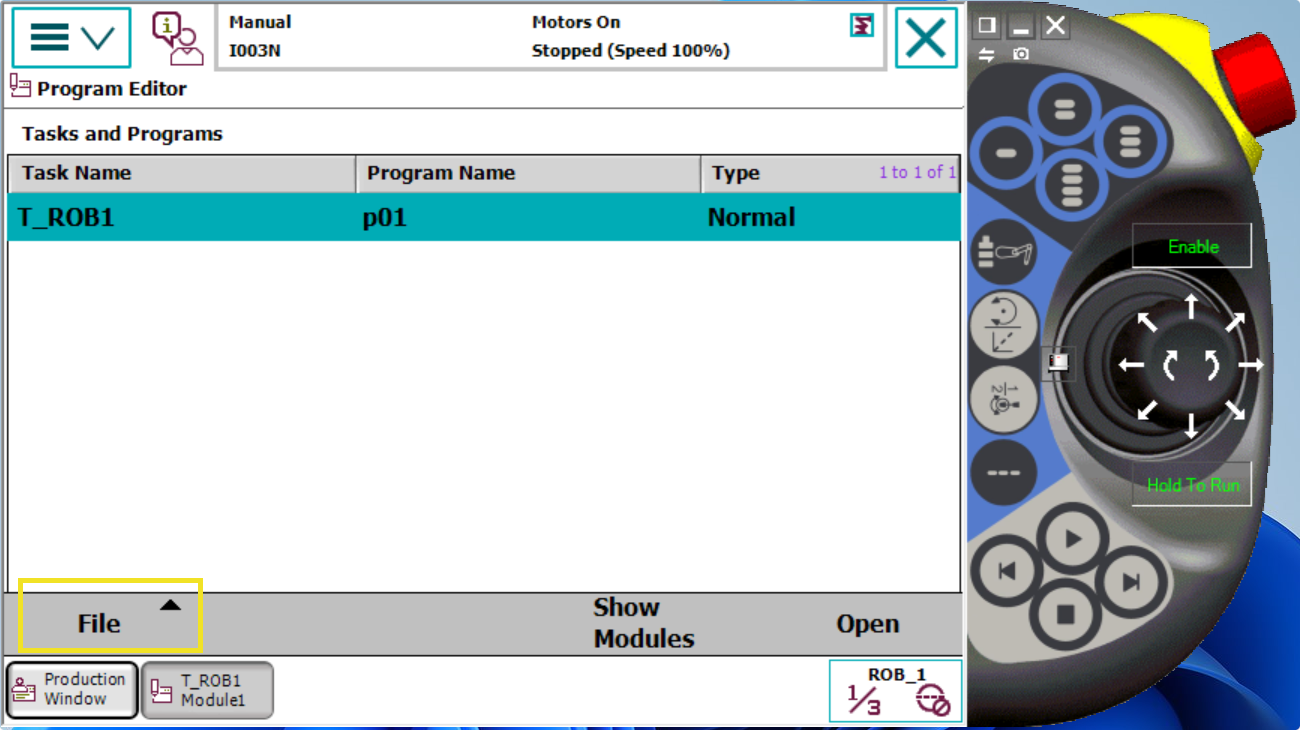
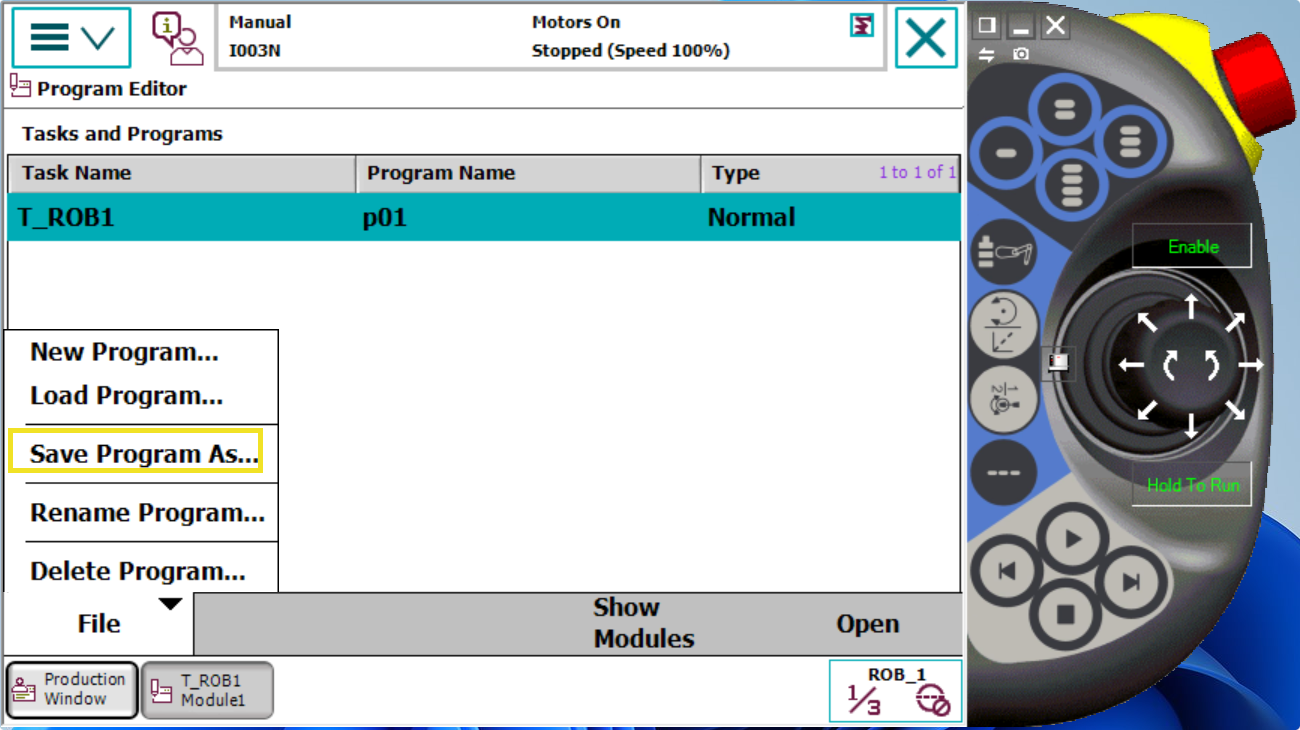
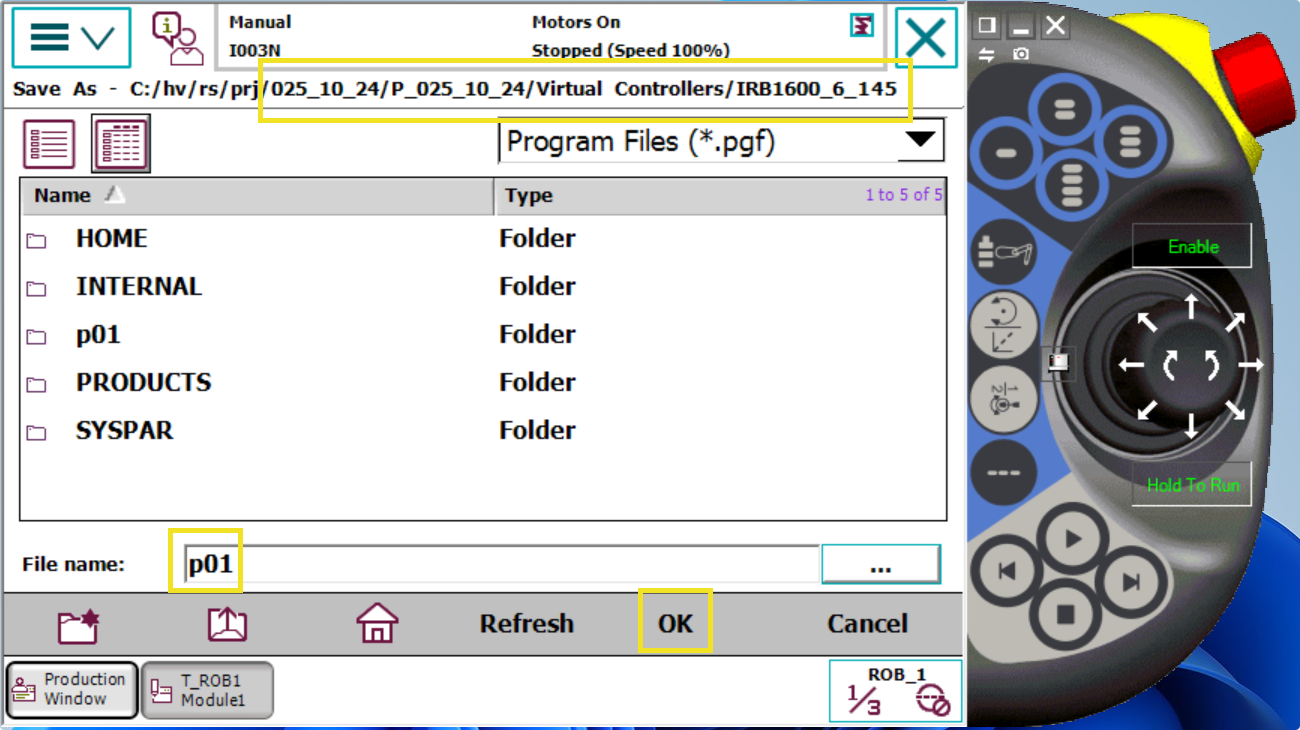
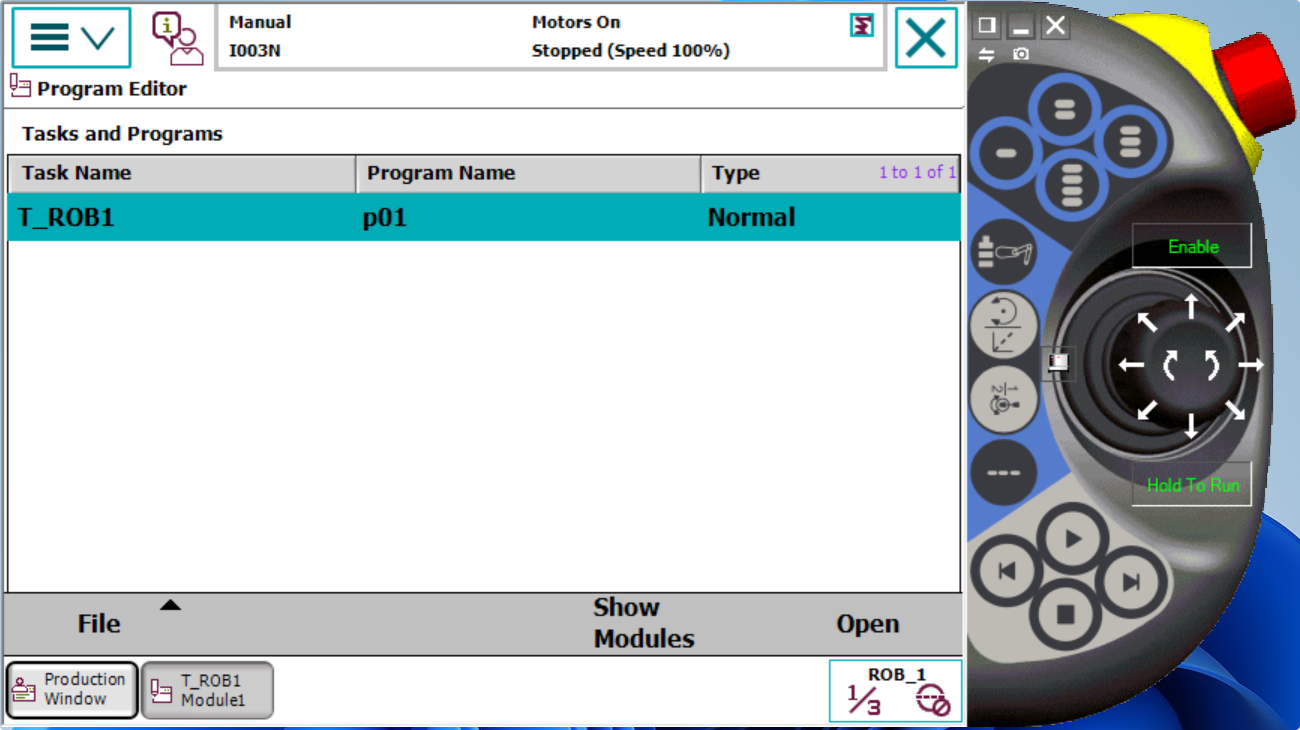
1.3. Esimese programmi koostamine juhtpuldi ‘FlexPendant’ abil. Juhtpult käivitatalse lehe tabil ‘Controller’ oleva nupu ‘FlexPendant’ vajutamise abil. Puldil vajutatakse võtmenuppu ja keeratakse võti 90 kraadi päripäeva. Vajutatakse nupud ‘Enable’ ja ‘Hold To Run’ rohelisteks. Vajutatakse juhtpuldi vasakus ülemises nurgas asuvat ABB nuppu. Avaneb menüü. Valitakse ‘Program Editor’. Avaneb programmiredaktor. Programmiredaktoris vajutatakse nuppu ‘Tasks and Programs’. Avaneb programmide loetelu. Vajutatakse nuppu ‘File’. Menüüst valitakse ‘Save Program As…’. Avaneb programmi salvestamise aken. Programm salvestatakse kataloogi ‘…/Virtual Controllers/IRB1600_6_145’. Programmi nimeks kirjutatakse ‘p01’ ja vajutatakse nuppu ‘OK’. Avaneb programmide loetelu. Programm on salvestatud nimega ‘p01’. Vajutatakse nuppu ‘Show Modules’. Avaneb moodulite loetelu. Marker viiakse reale ‘Module1 Program module’. Vajutatakse nuppu ‘Show Module’. Avaneb aken programmi ‘p01’ tekstiga.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
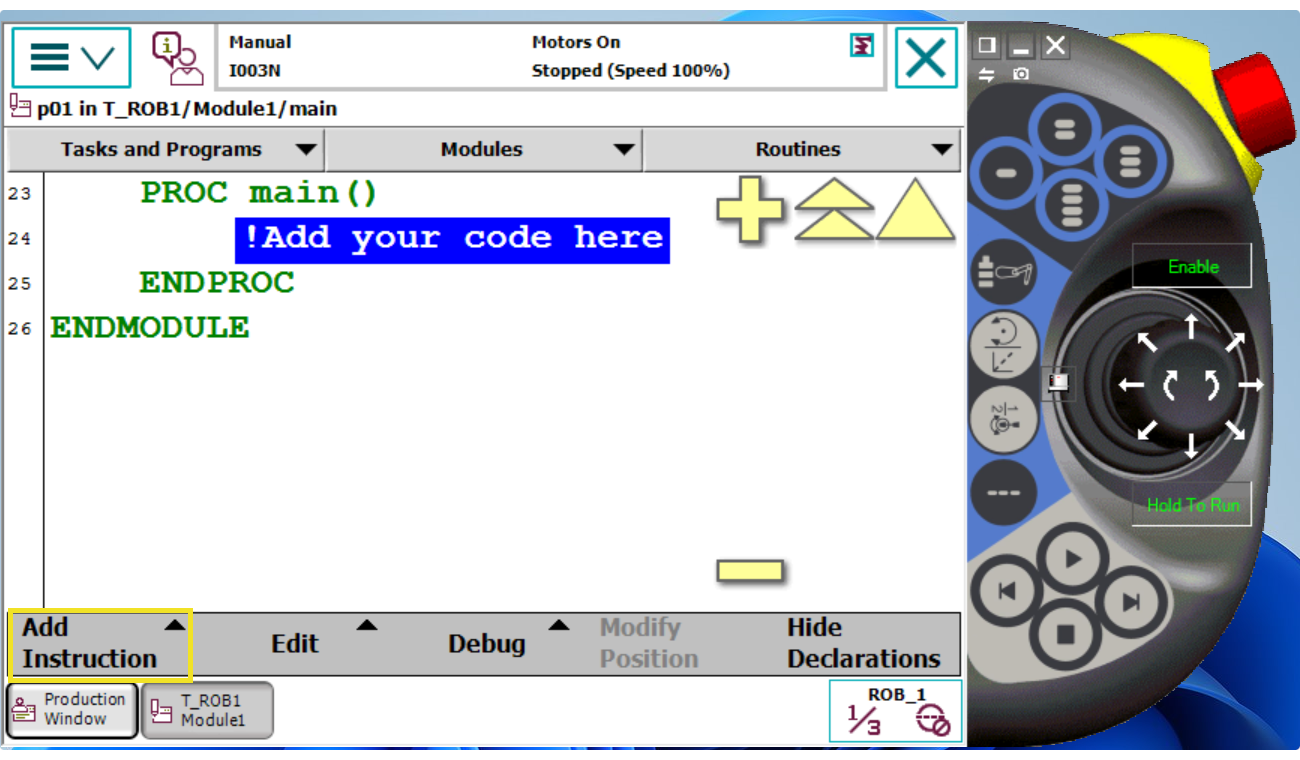
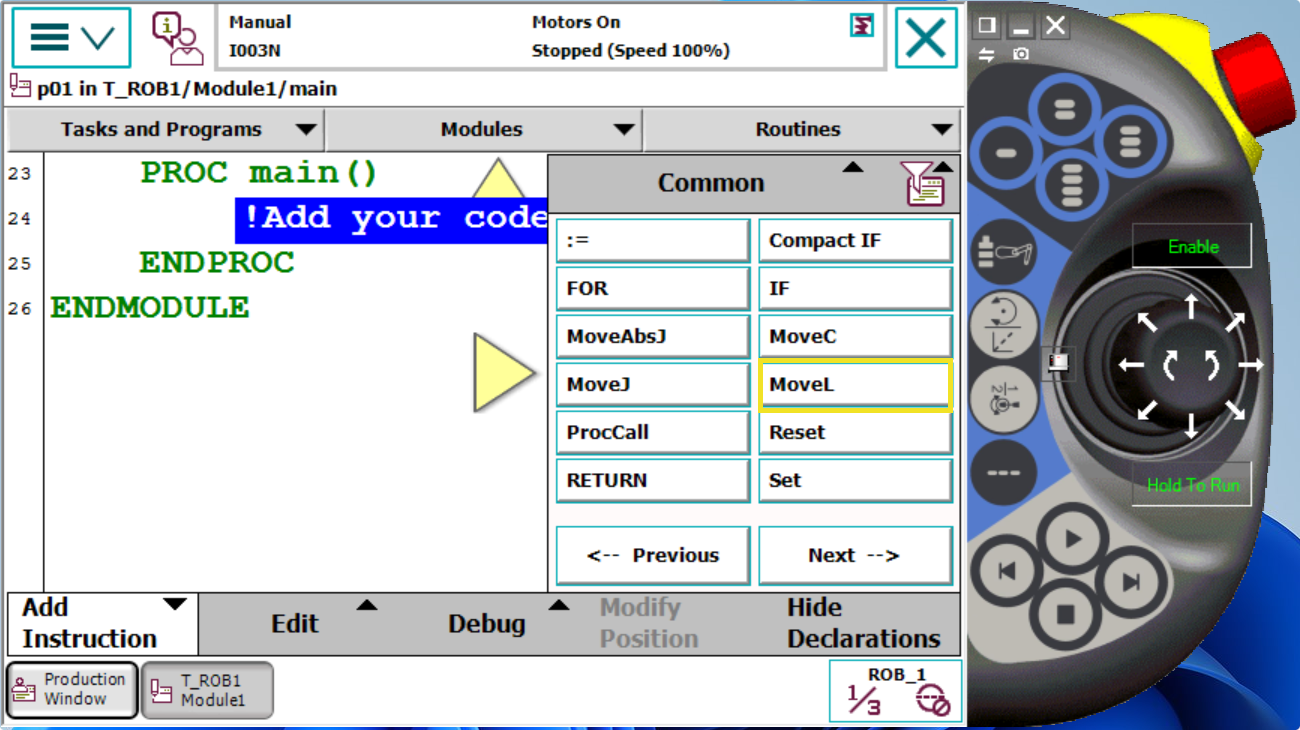
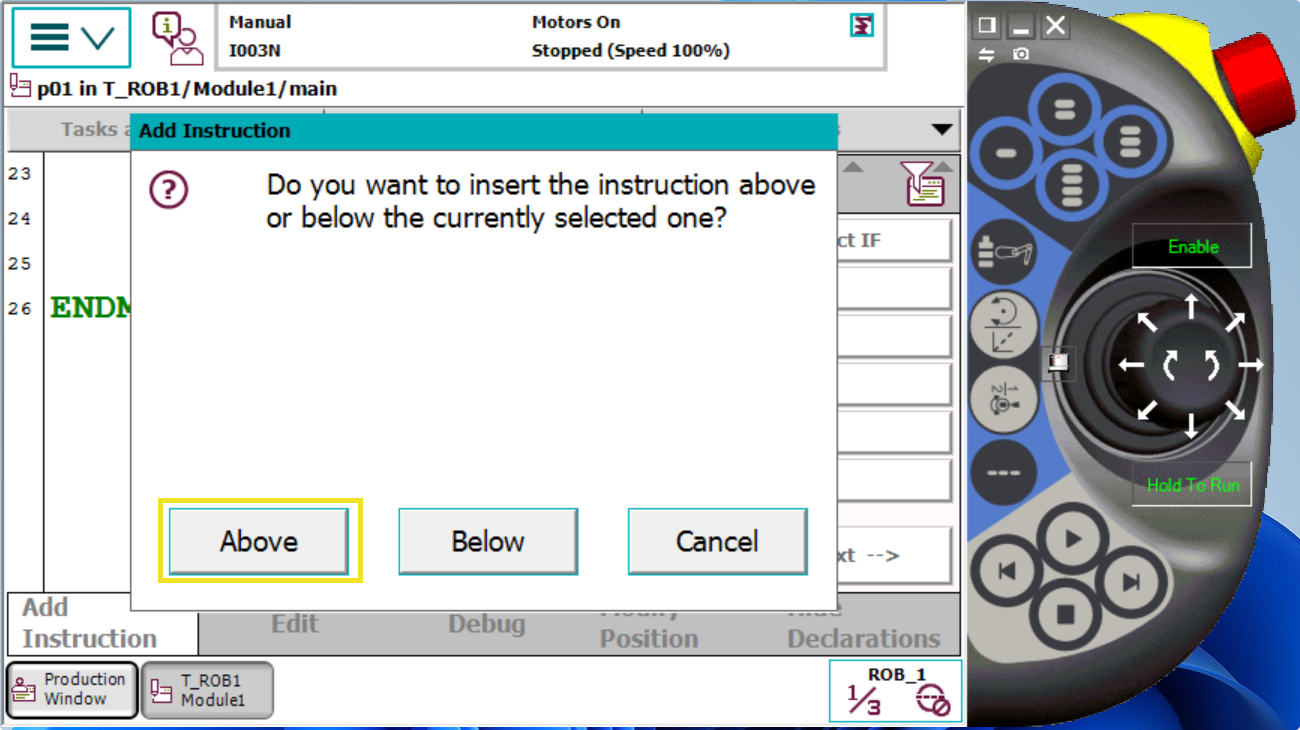
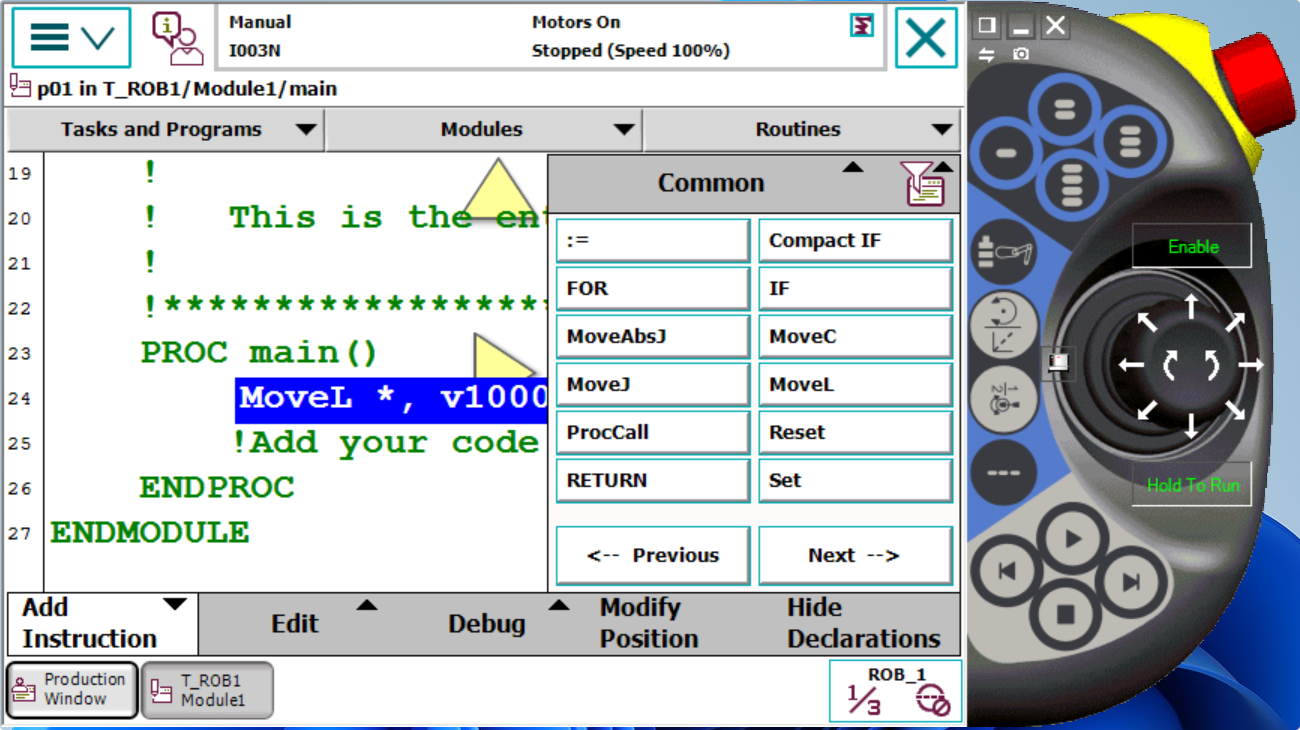
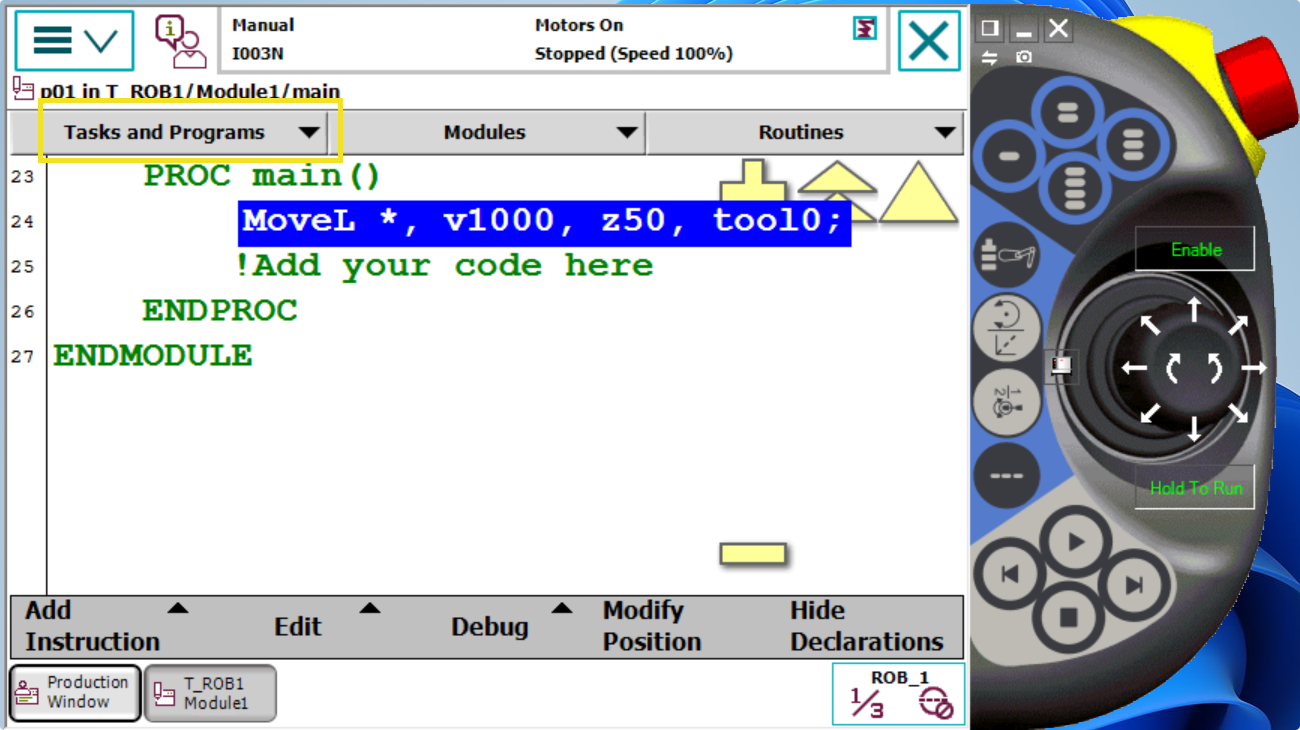
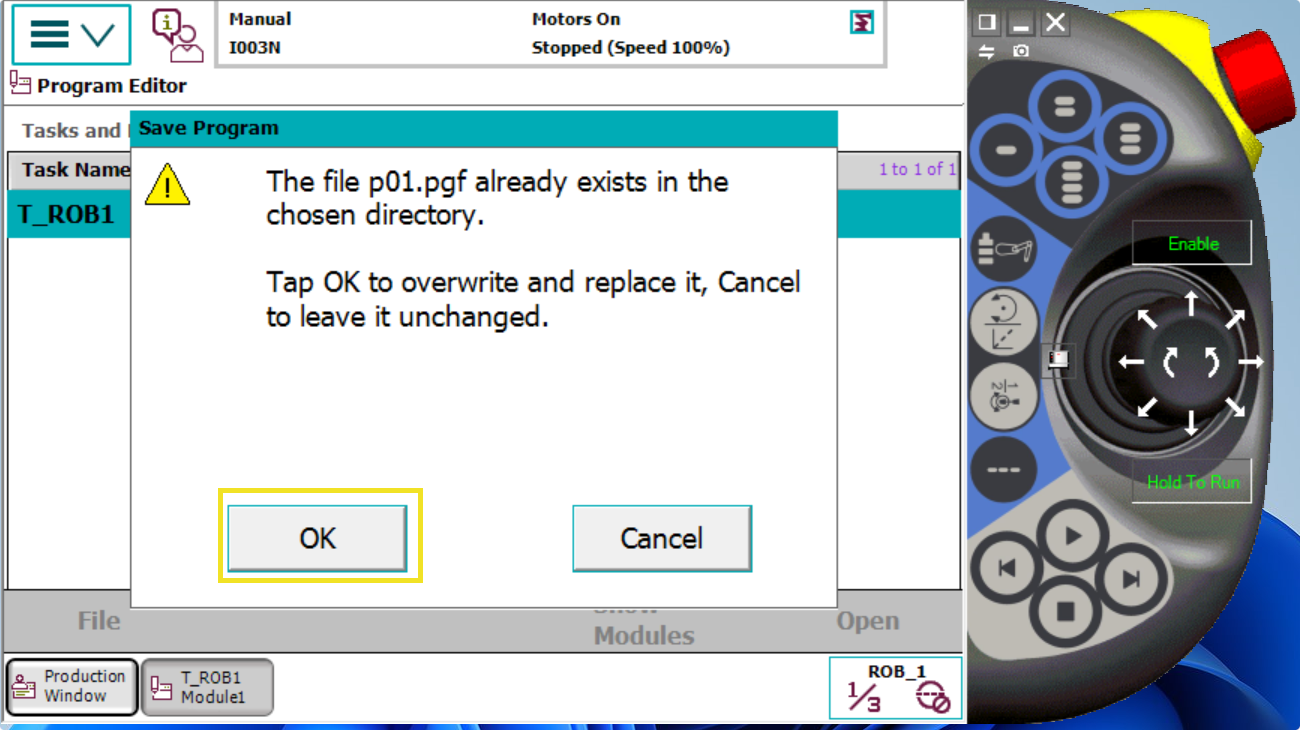
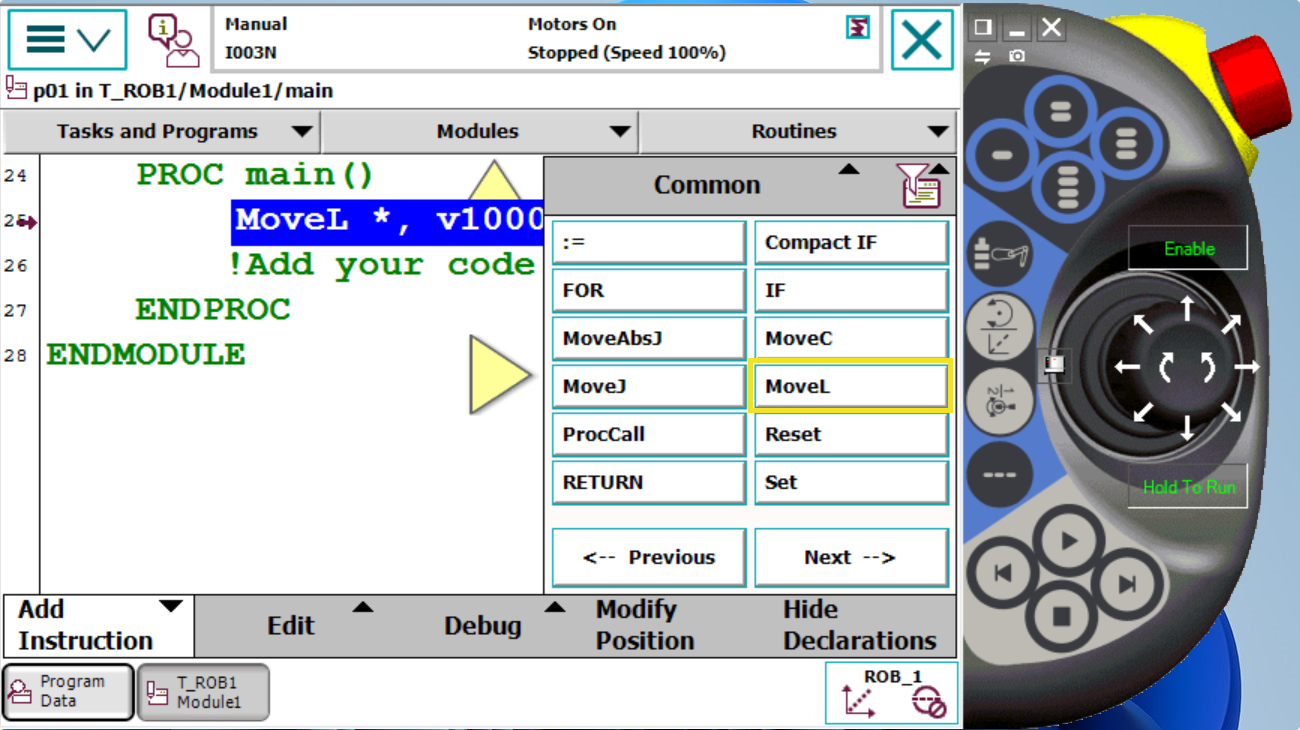
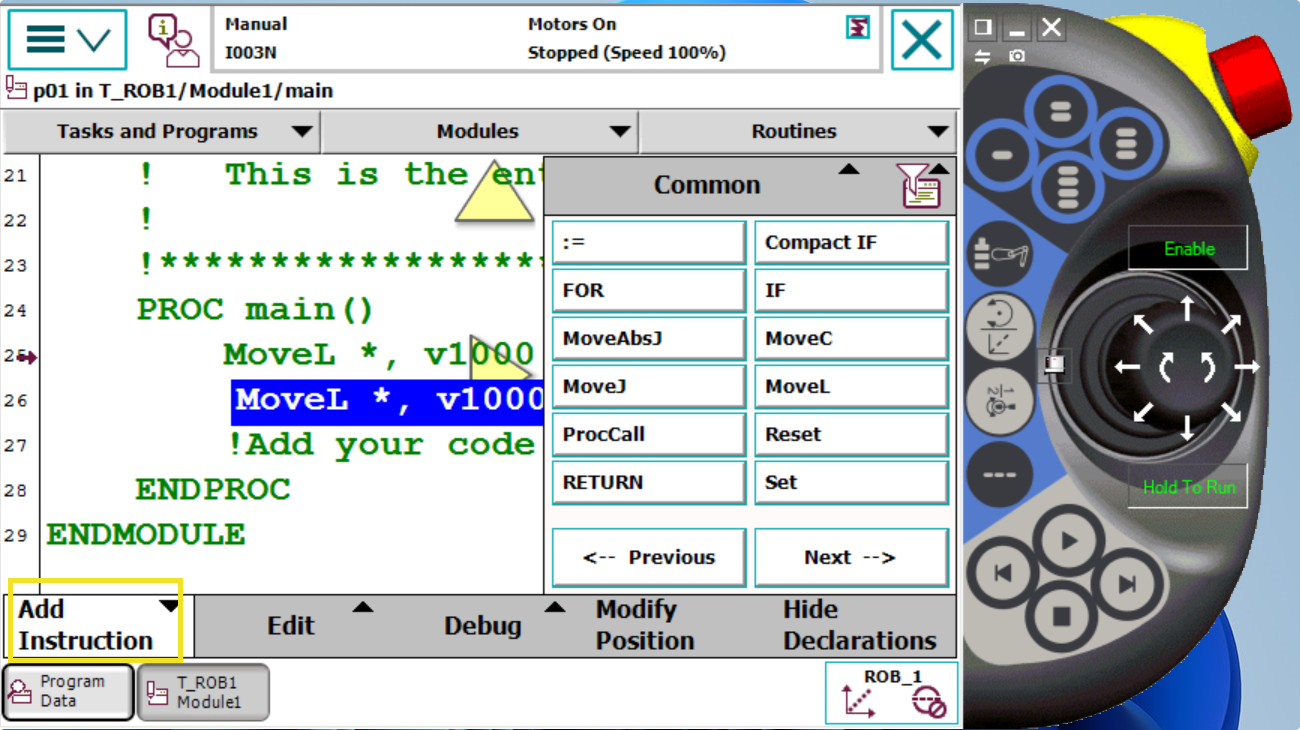
1.4. Programmile ‘p01’ lisatakse käsk ‘moveL’ ja programm salvestatakse. Lehe all vasakus servas vajutatakse nuppu ‘Add Instruction’ . Lehe paremasse serva ilmub käskude tabel. Valitakse käsk ‘MoveL’. Lehel valitakse nupp ‘Above’ – uus rida lisatakse markeriga märgitud rea kohale. Käsk ‘MoveL * V1000…‘ on lisatud. Programmi ‘p01’ salvestamiseks valitakse lehel ‘Tasks and Programs’. Lehel vajutatakse nuppu ‘File’. Menüüst valitakse ‘Save Program As…’. Lehel vajutatakse nupp ‘OK’. Programmi nimi on ‘p01’ ja kataloog on ‘…/Virtual Controllers/IRB1600_6_145’. Lehel vajutatakse nuppu ‘OK’. Programm on salvestatud. Programmi ‘p01’ vaatamiseks kasutatakse nuppusid ‘Show Modules’ ja ‘Show Module’.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
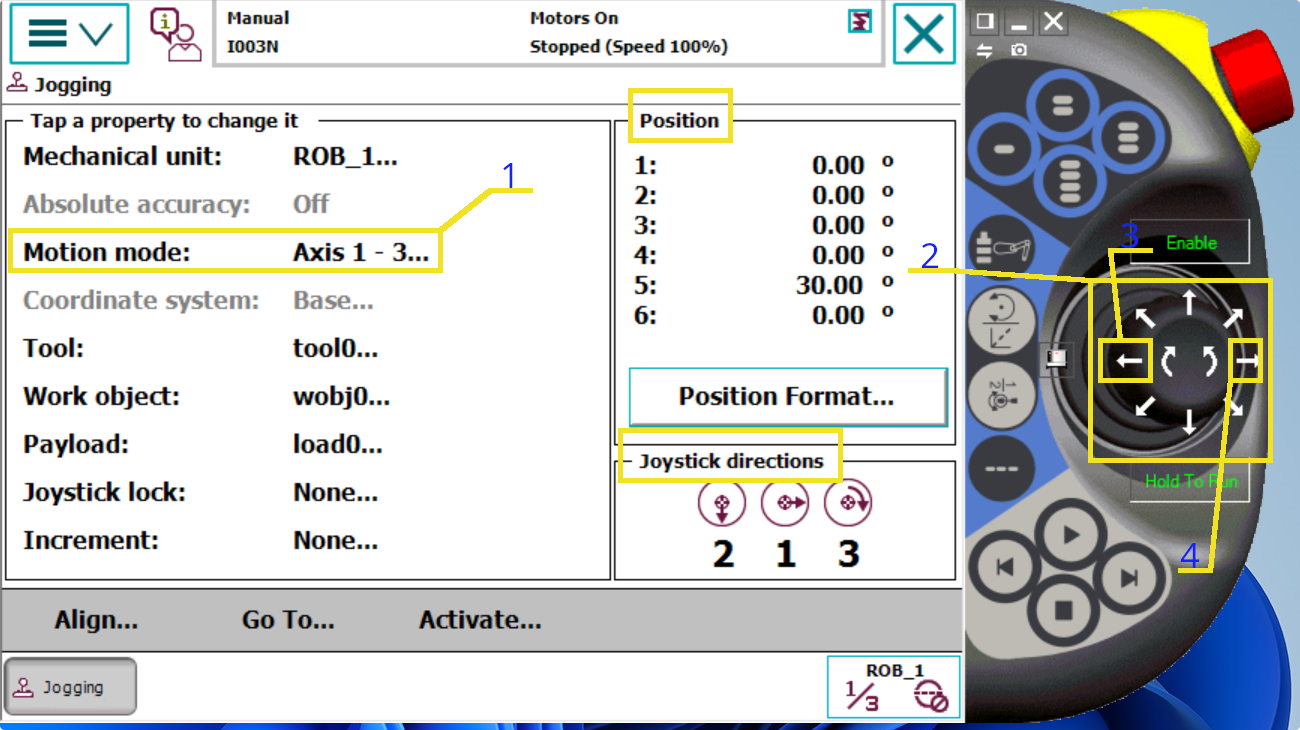
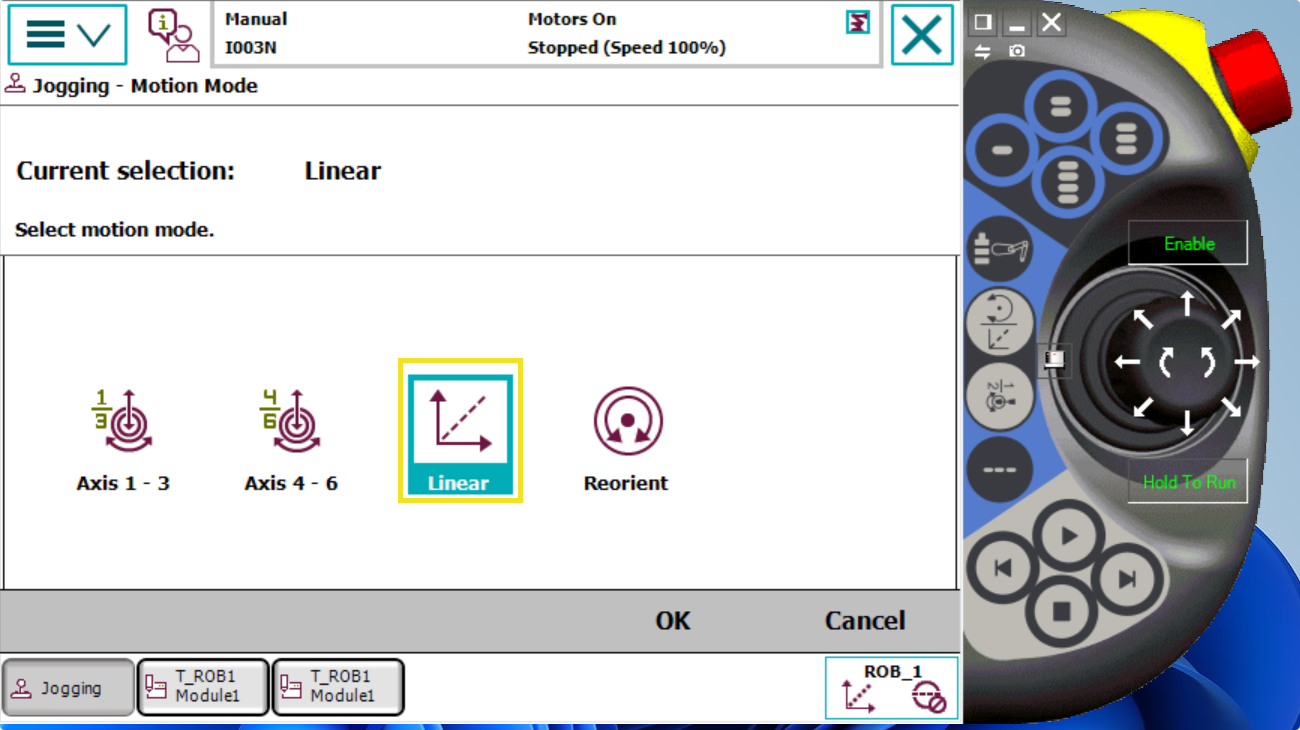
1.5. Roboti liigutamine juhtpuldi ‘FlexPendant’ abil. Vajutatakse ABB nuppu. Menüüst valitakse ‘Jogging’. Roboti lülide 1, 2, 3 liigutamiseks kasutatakse meetodit ‘Motion Mode axis 1-3‘ [1]. Lülisid liigutatakse juhthoova [2] abil. Juhthoova liigutamine vasakule [3] – paremale[4] liigutab esimest lüli, juhthoova liigutamine alla-üles liigutab teist lüli vastavalt väljale ‘Joystick directions’.
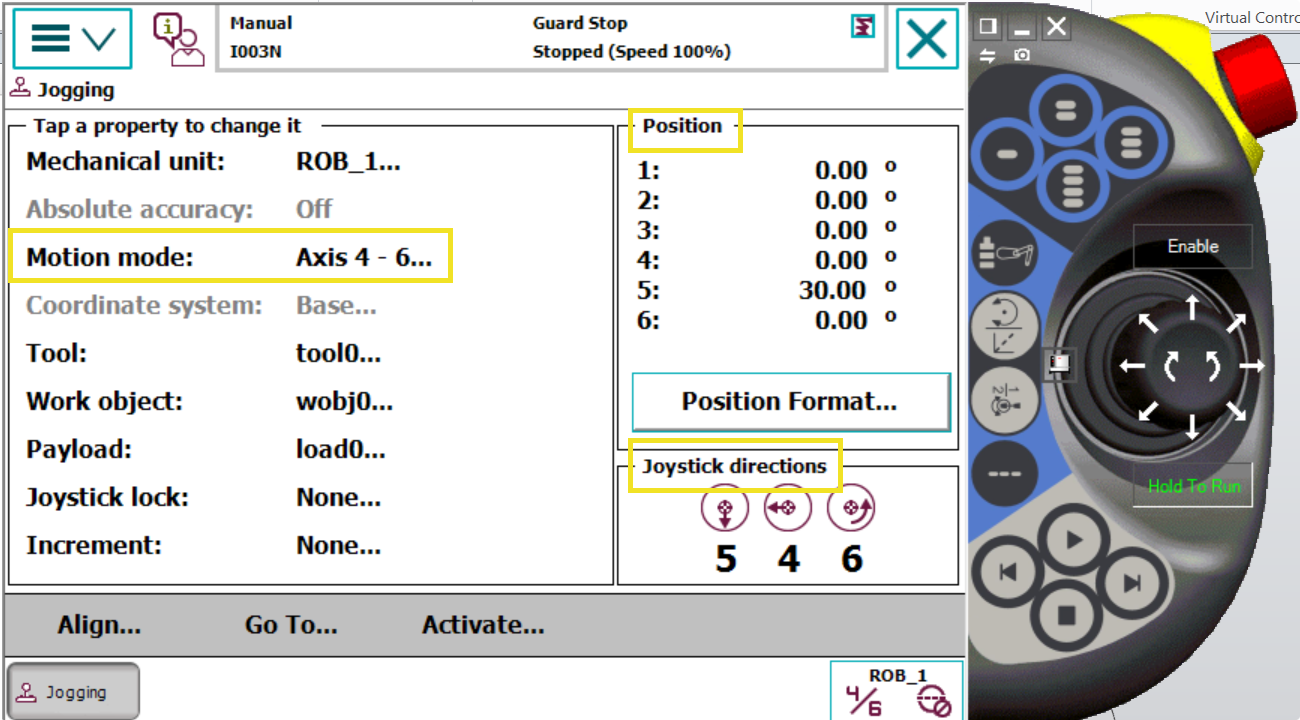
Lülide 4, 5, 6 liigutamiseks kasutatakse meetodit ‘Motion Mode axis 4-6‘. Juhthoova ja lülide vaheline seos on on väljal ‘Joystick directions’. Väljal ‘Position’ on lülide pöördenurgad kraadides.
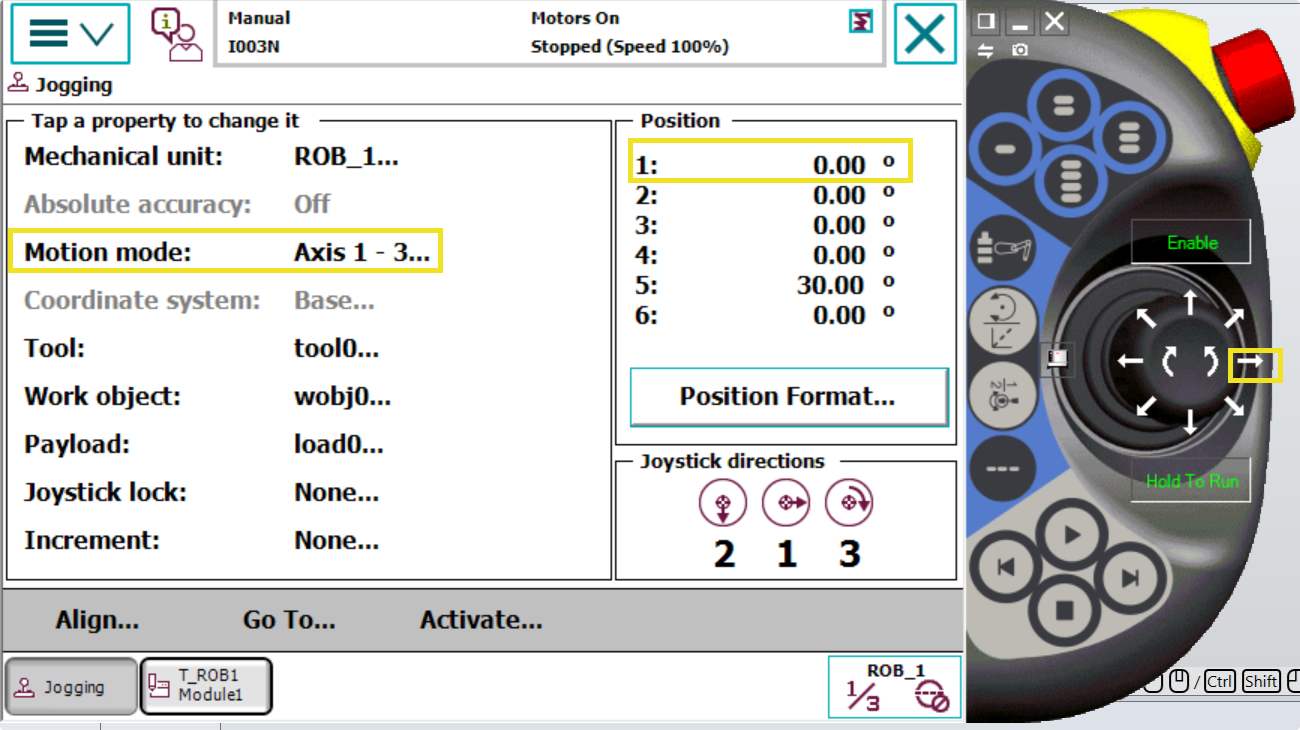
Näiteks esimese lüli liigutamiseks ülalt alla vaadates vastupäeva kasutatakse meetodit ‘Motion Mode axis 1-3‘. Vajutatakse juhthooval nuppu ‘nool paremale’. Esimese lüli pöördenurk on väljal ‘Position’ esimesel real.
{kind=link}
{kind=link}
{kind=link}
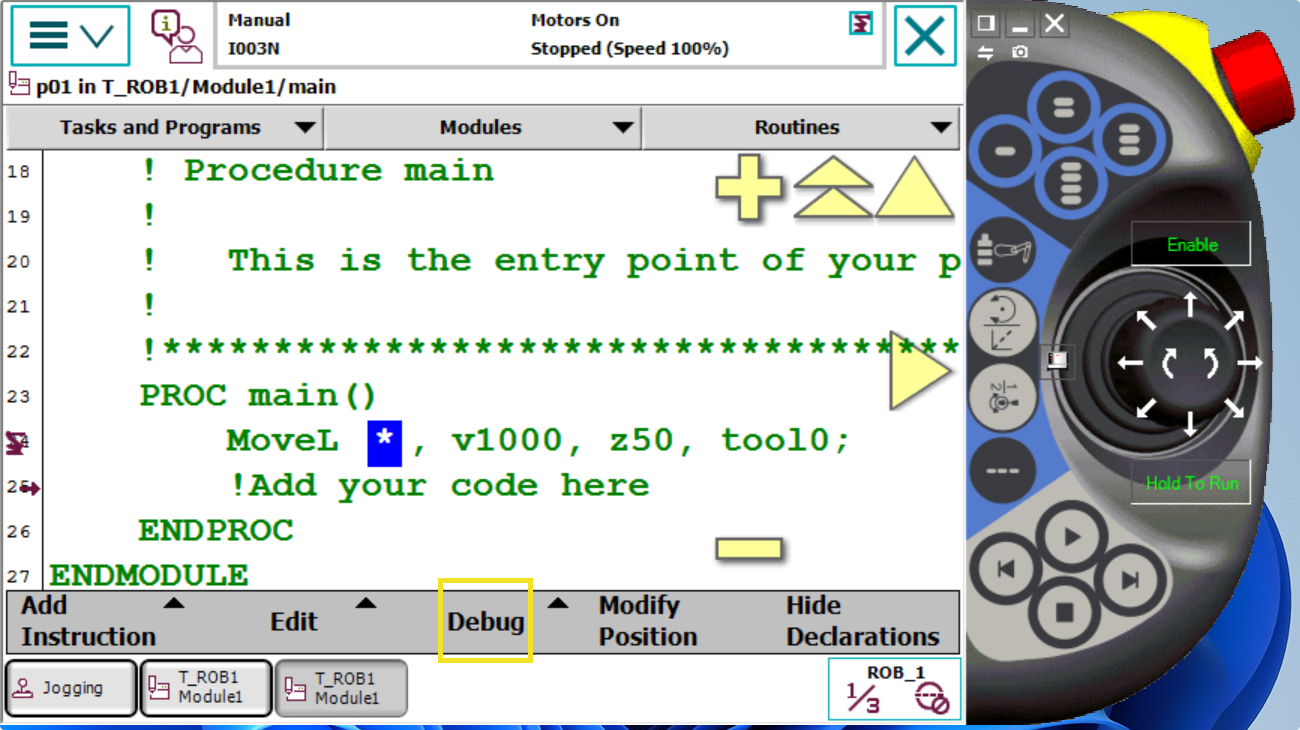
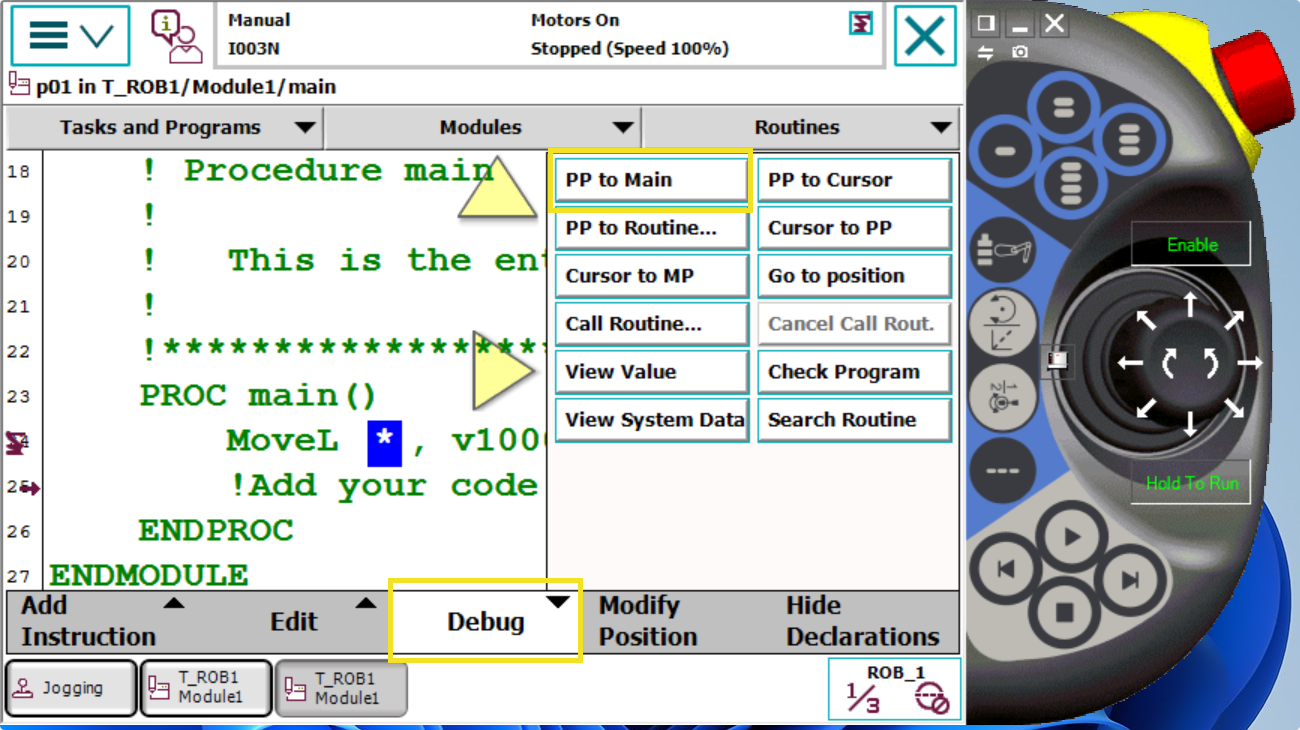
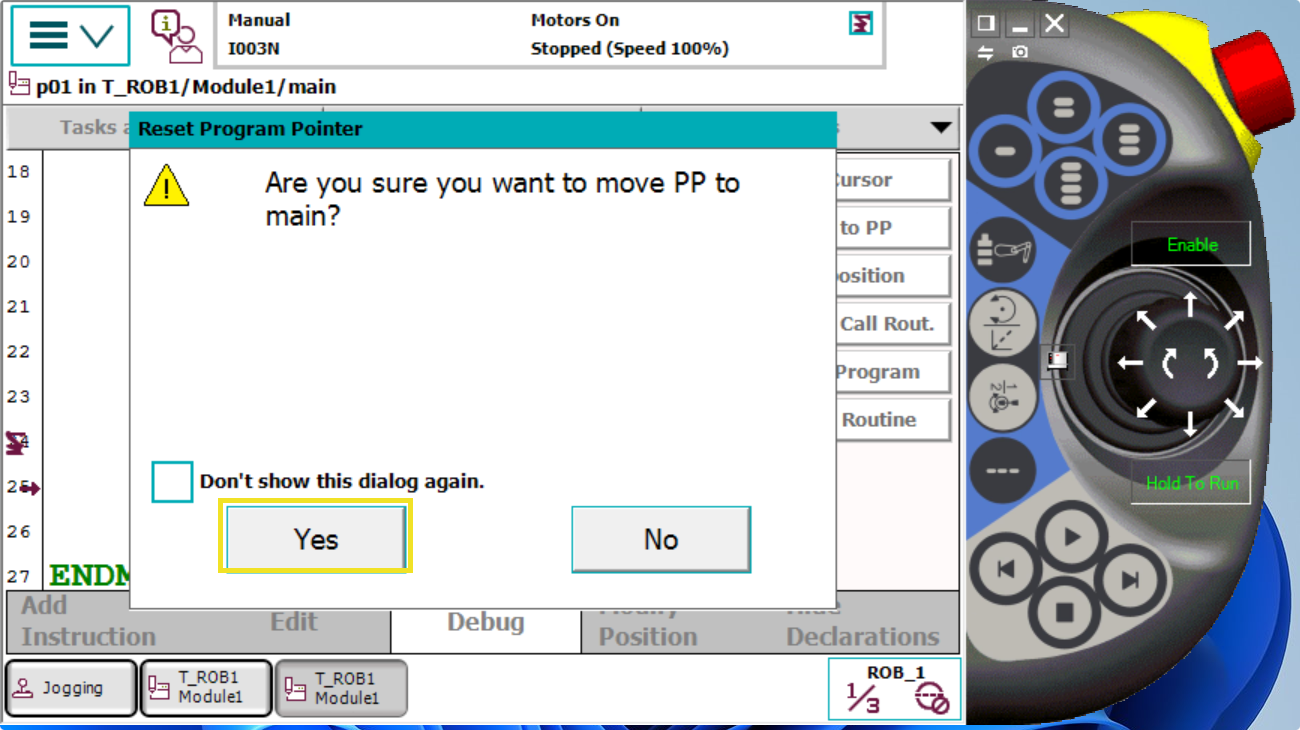
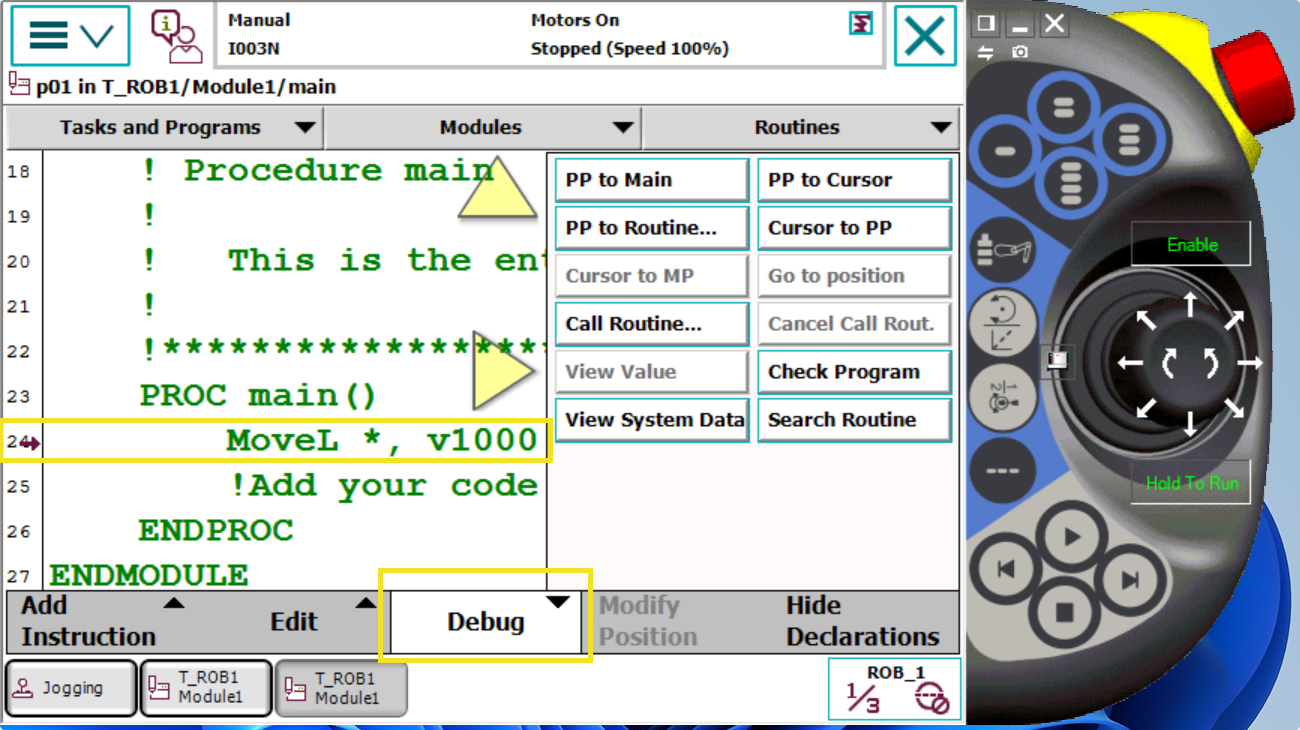
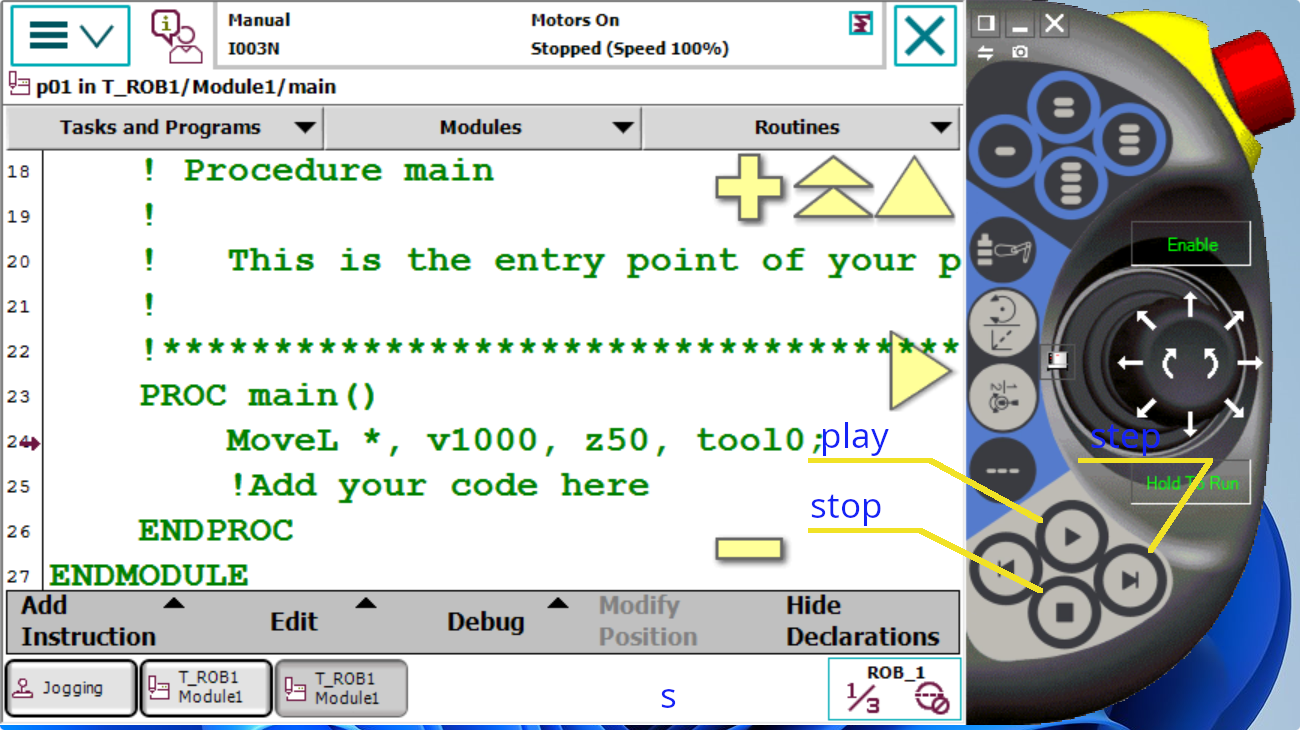
1.6. Roboti liigutamine programmi ‘p10’ abil. Roboti liigutamiseks algasendisse kasutatakse programmi ‘p01’. Avatakse programmi redaktor. Vajutatakse nuppu ‘Debug’. Vajutatakse ‘PP to Main‘ See nupp viib programmi viida (program pointer) protseduuri ‘main’ algusesse. Teatele vastatakse ‘Yes’. Programmi viit asub nüüd real 24. Et programmi teksti paremini naha, vajutatakse nuppu ‘Debug’. Programmi juhtimiseks on nupud ‘Play’, ‘Step’, ‘Stop’.
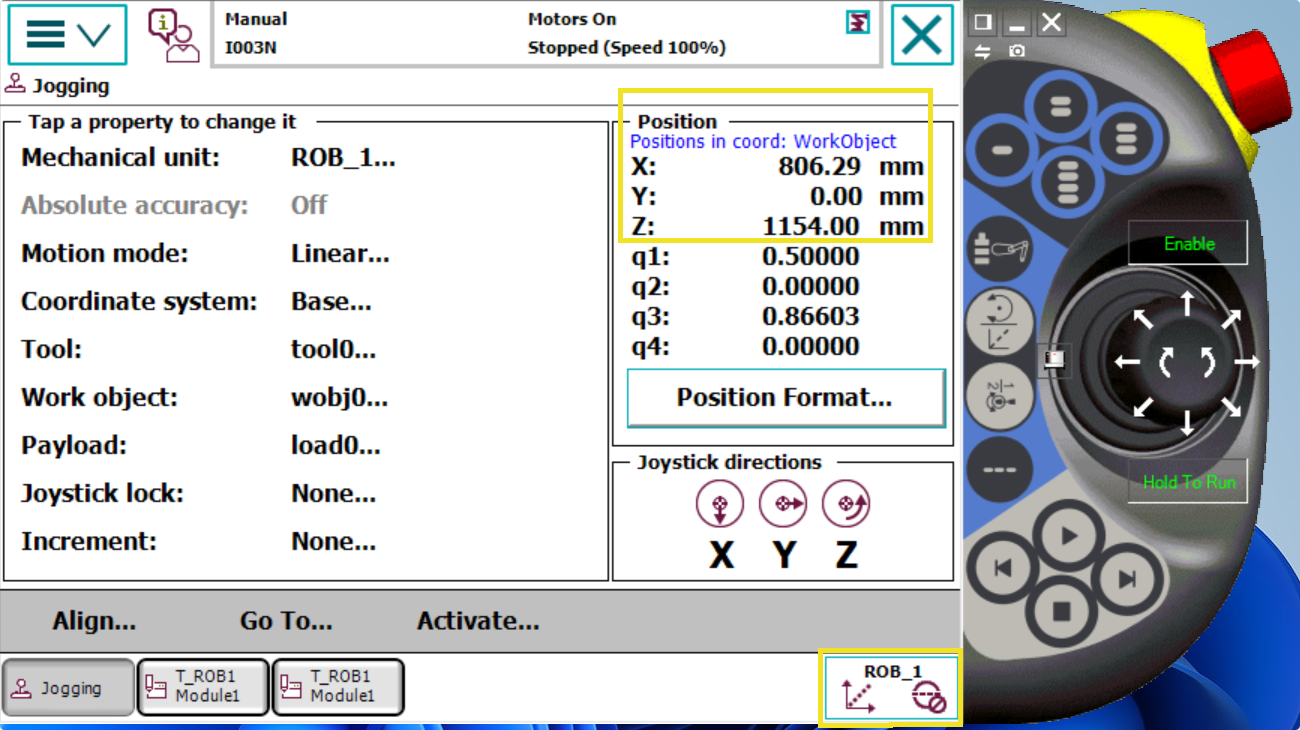
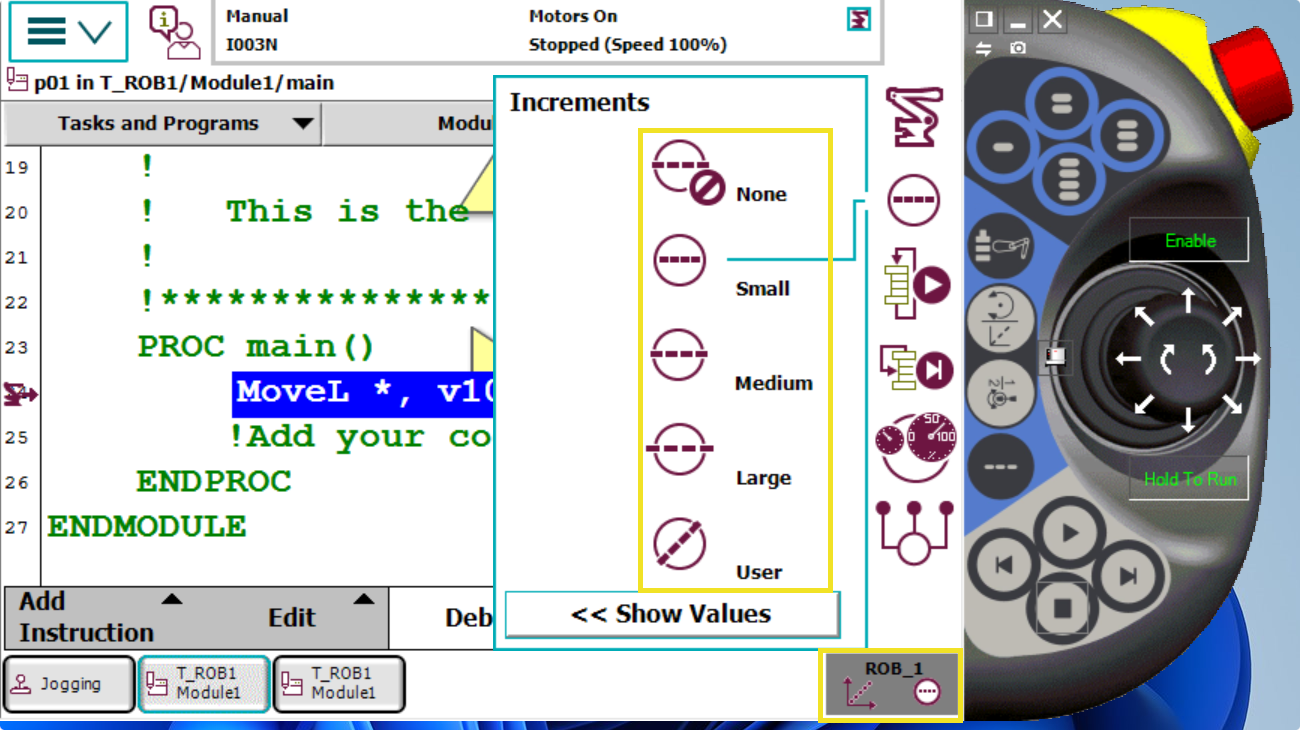
Kui manipulaatori liigutamiseks kasutatakse meetodit ‘Linear‘, siis on manipulaatori asukoht määratud koordinaatide XYZ kaudu. Koordinaadid on väljal ‘Position’. Sammu pikkuse määramiseks kasutatakse nuppu ‘ROB_1‘ /041_step_l.png/
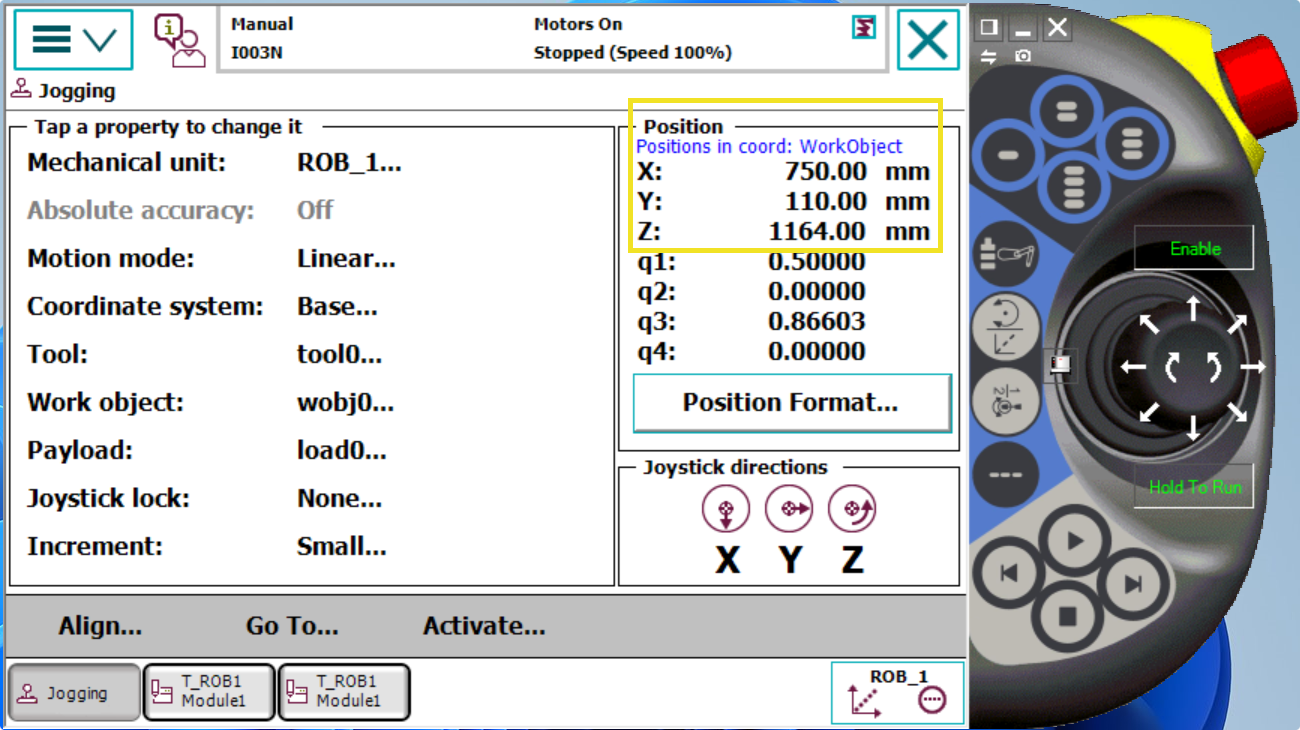
Viige manipulaator asukohta X = 750 Y = 110 Z = 1164. Seejarel käivitage programm ‘p01’ , mis viib manipulaatori algasendisse tagasi.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
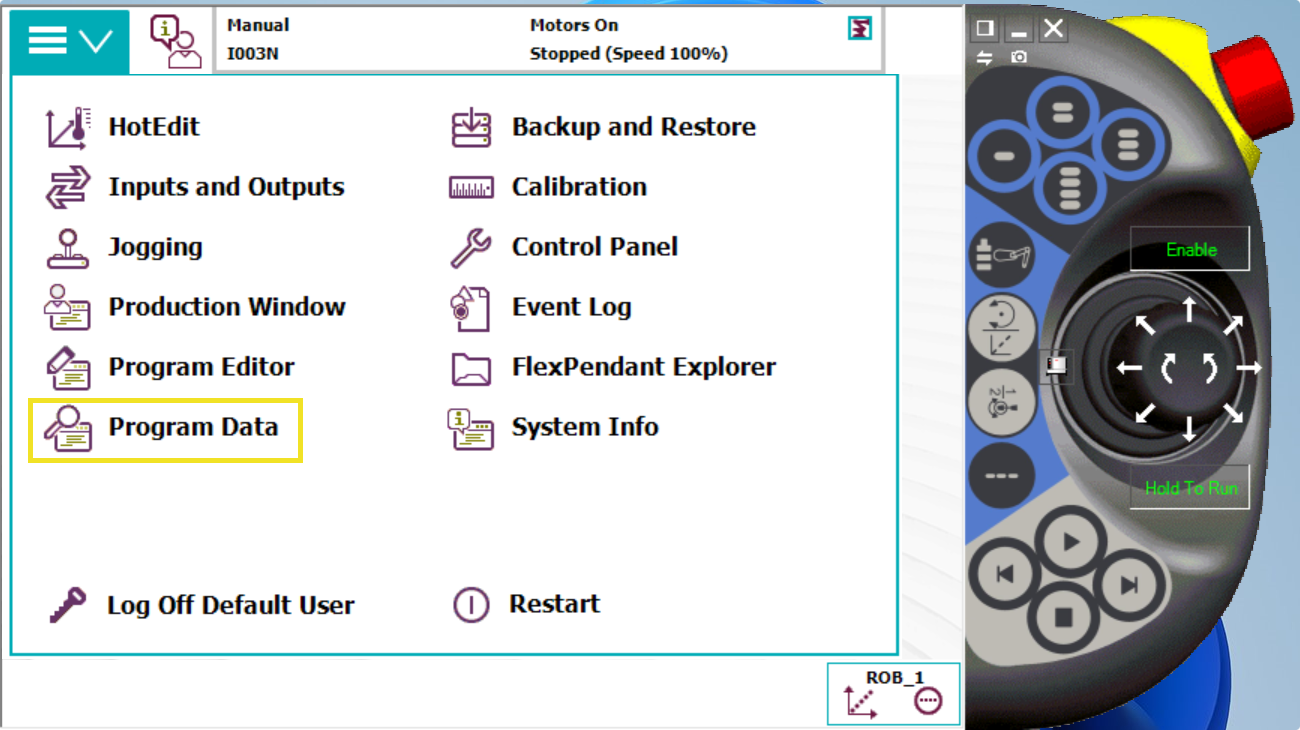
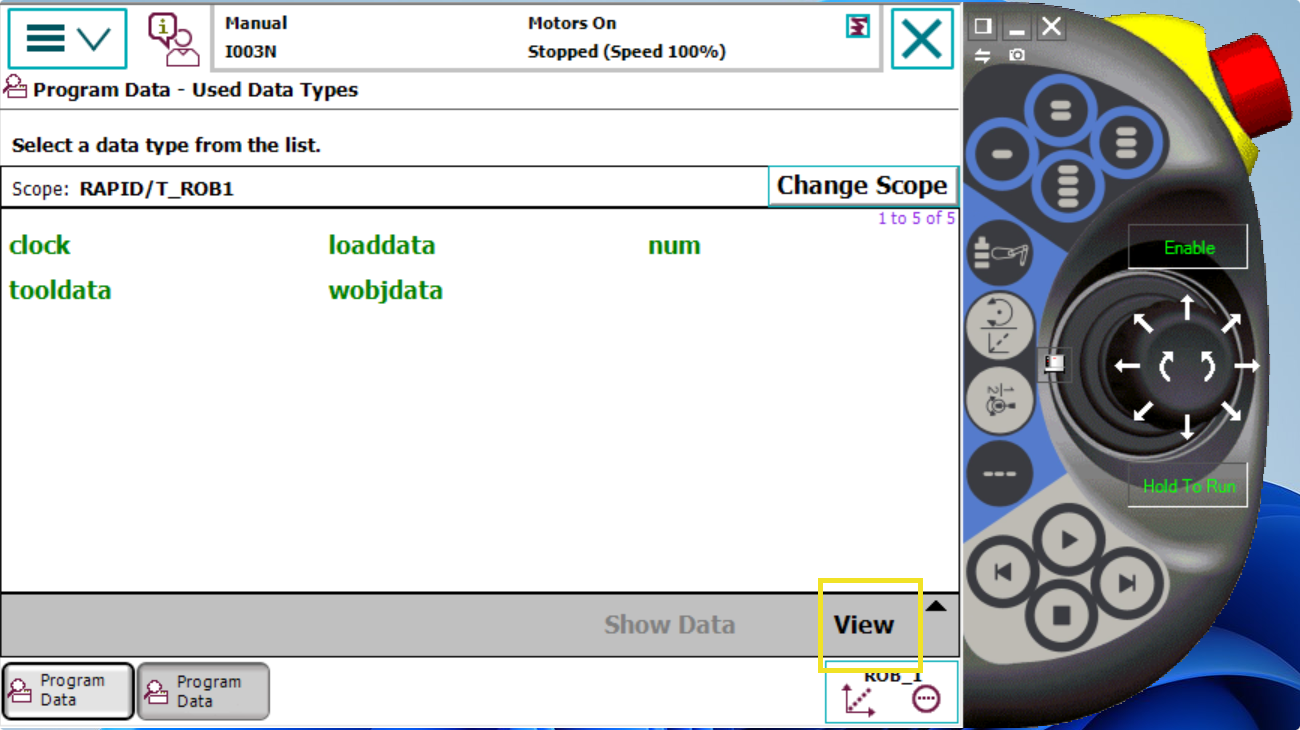
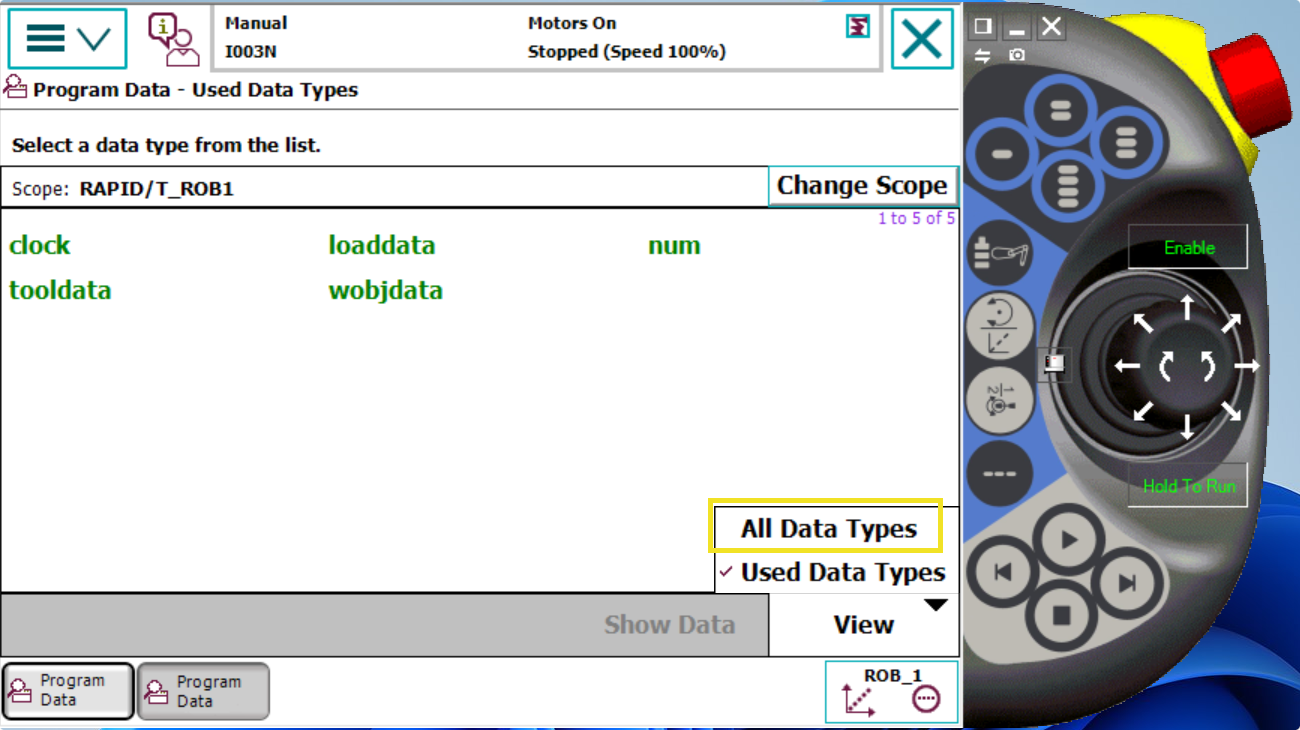
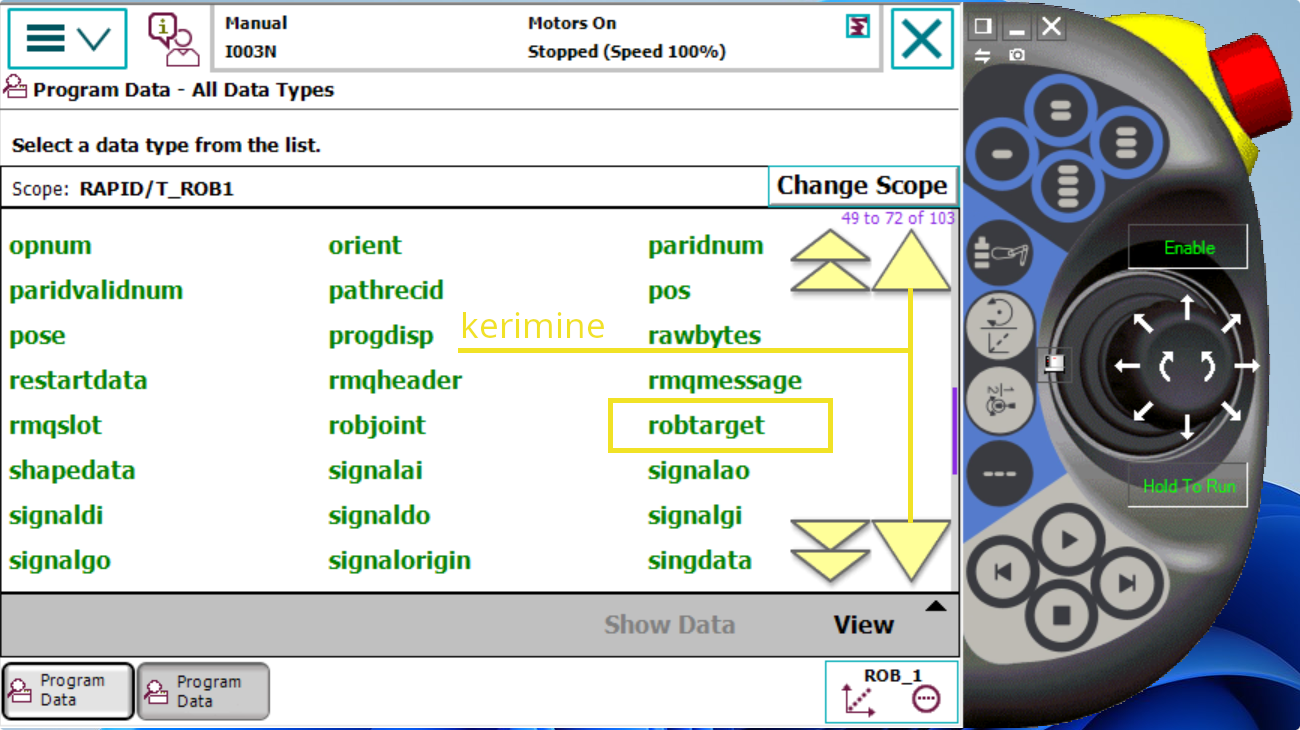
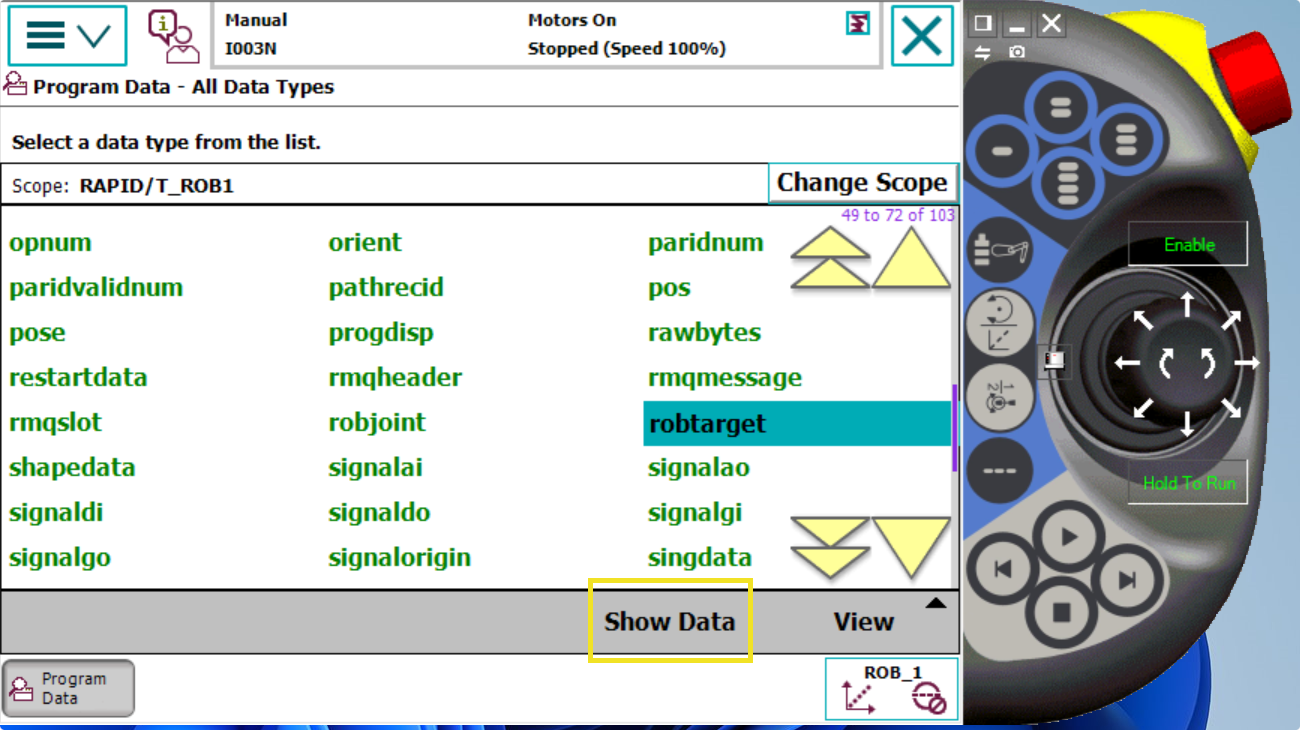
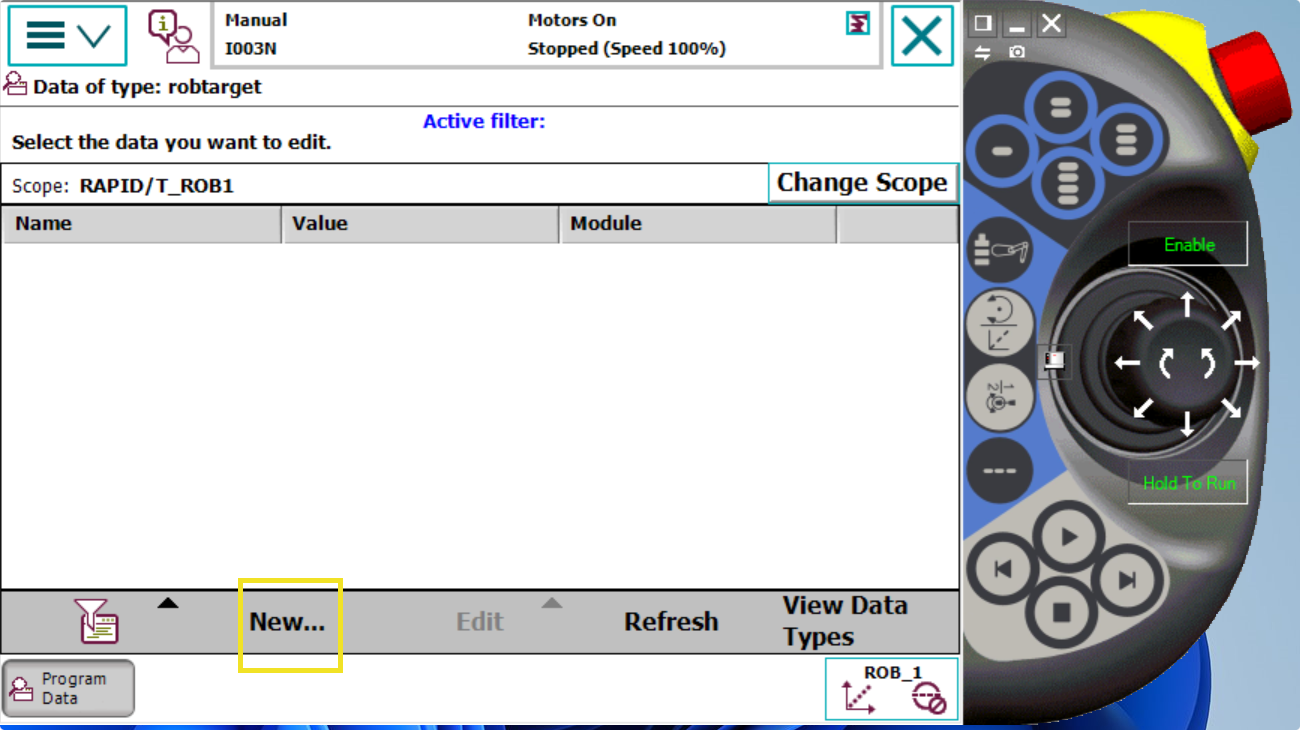
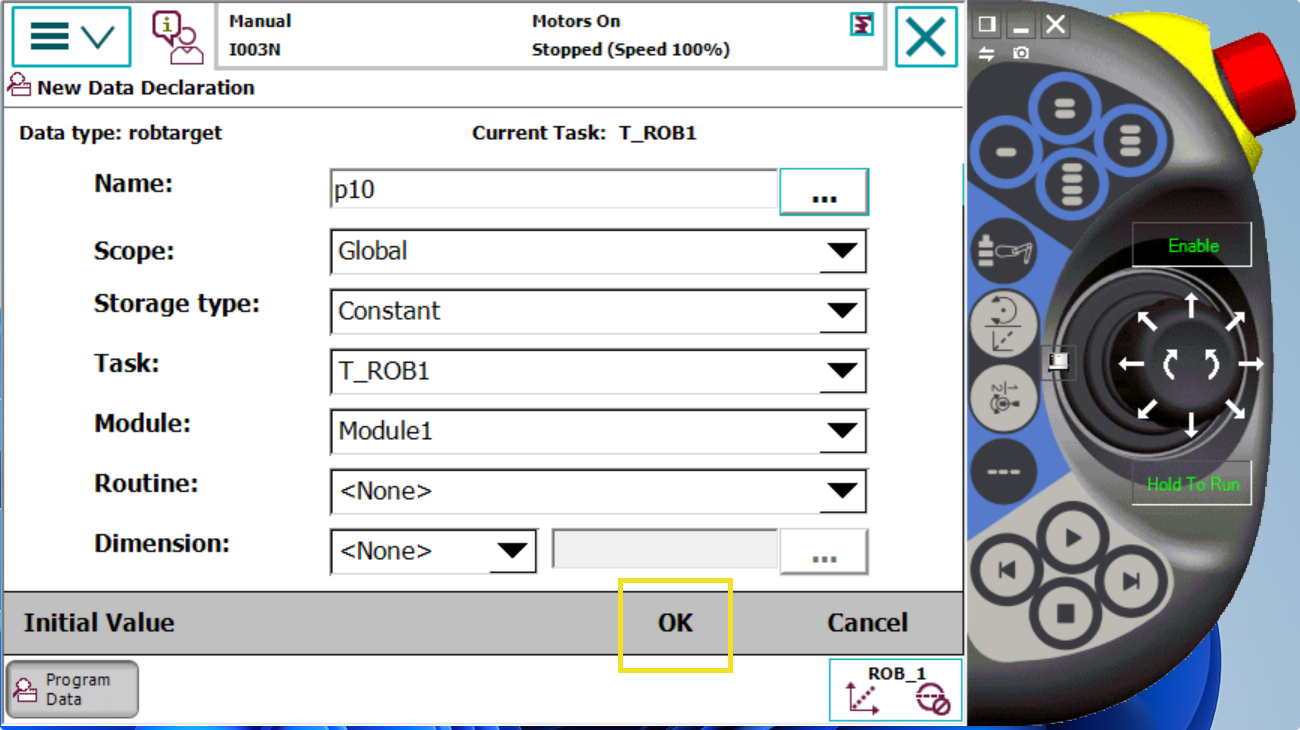
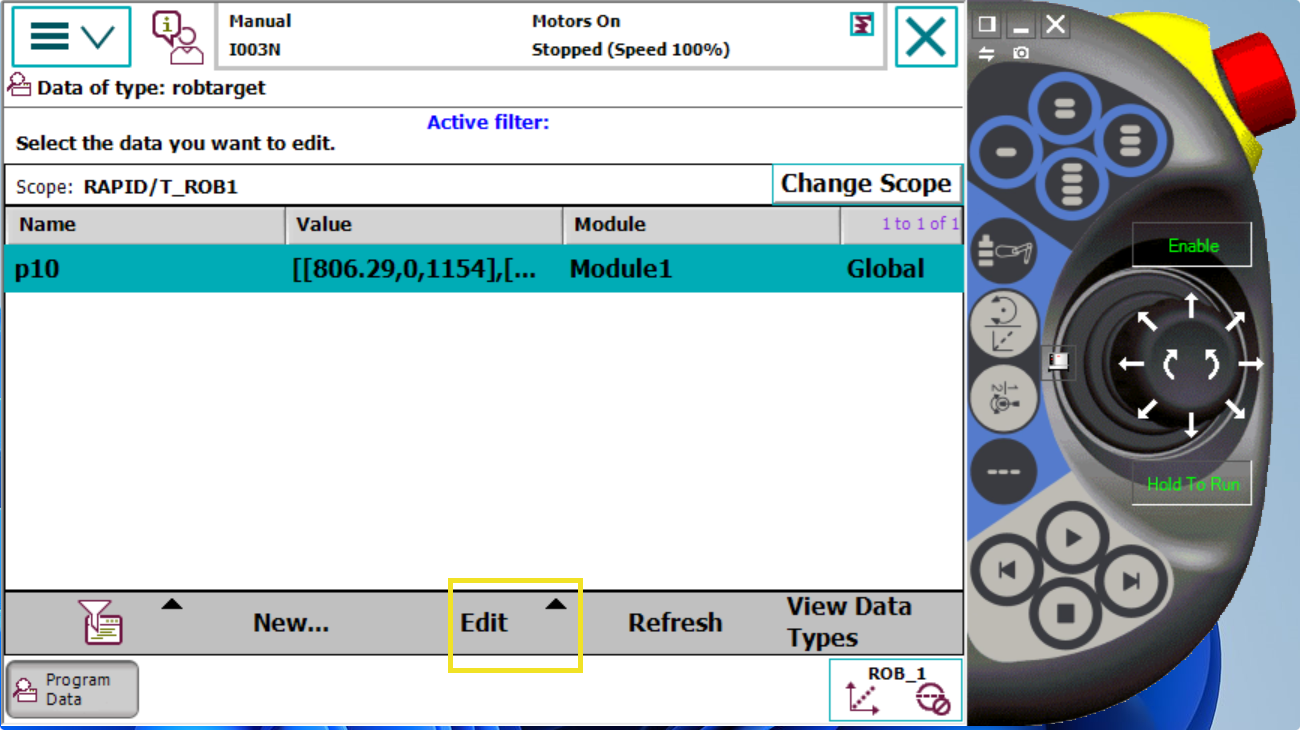
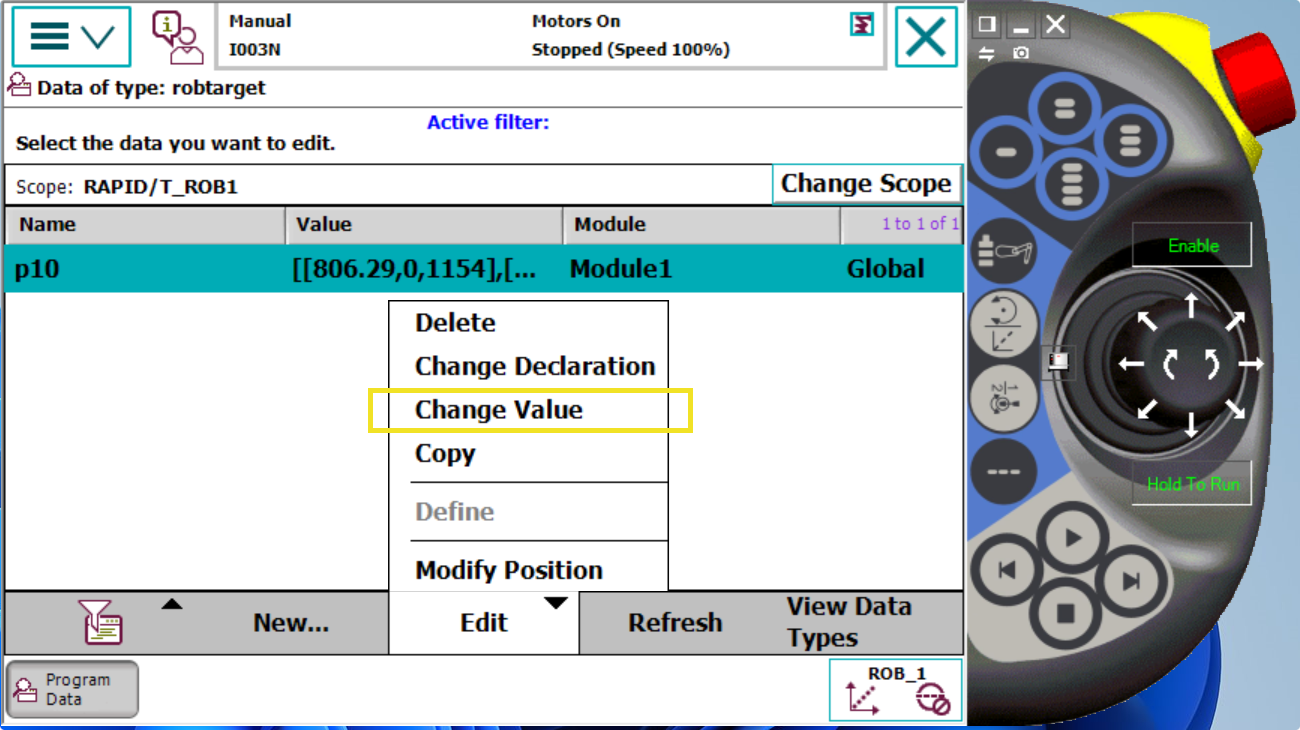
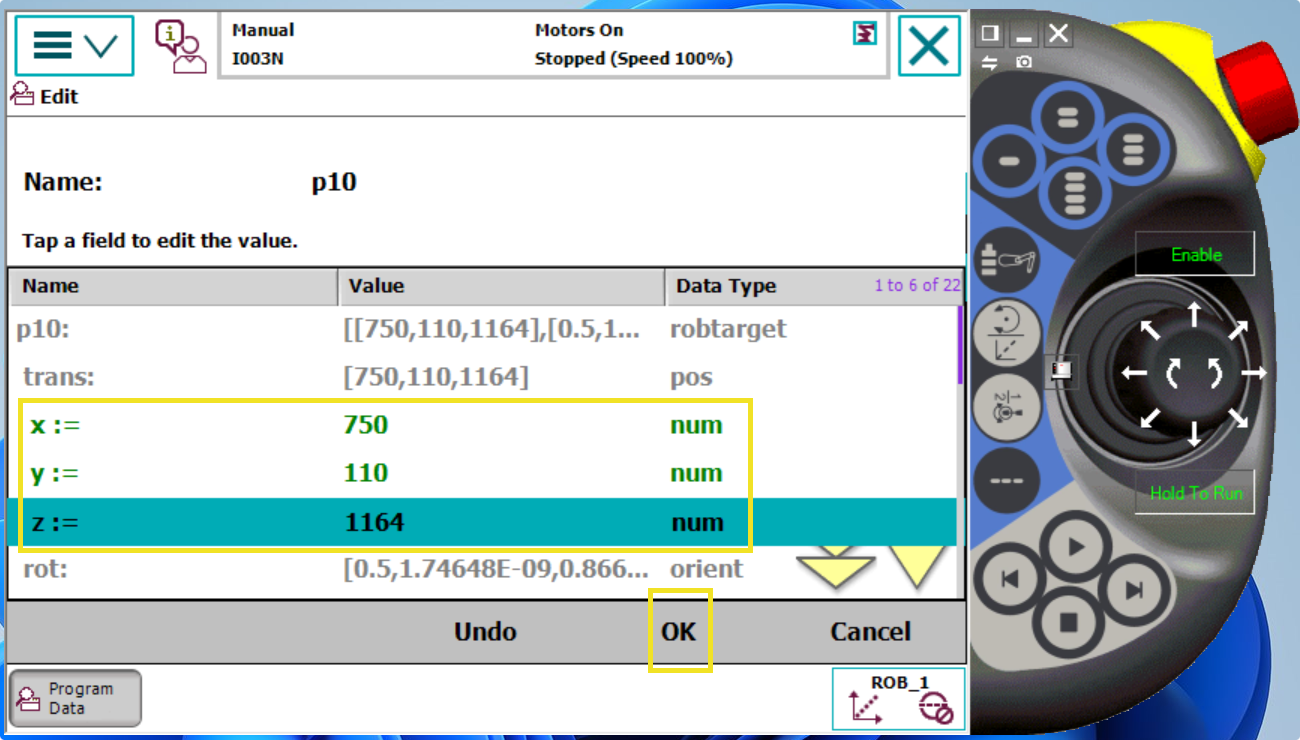
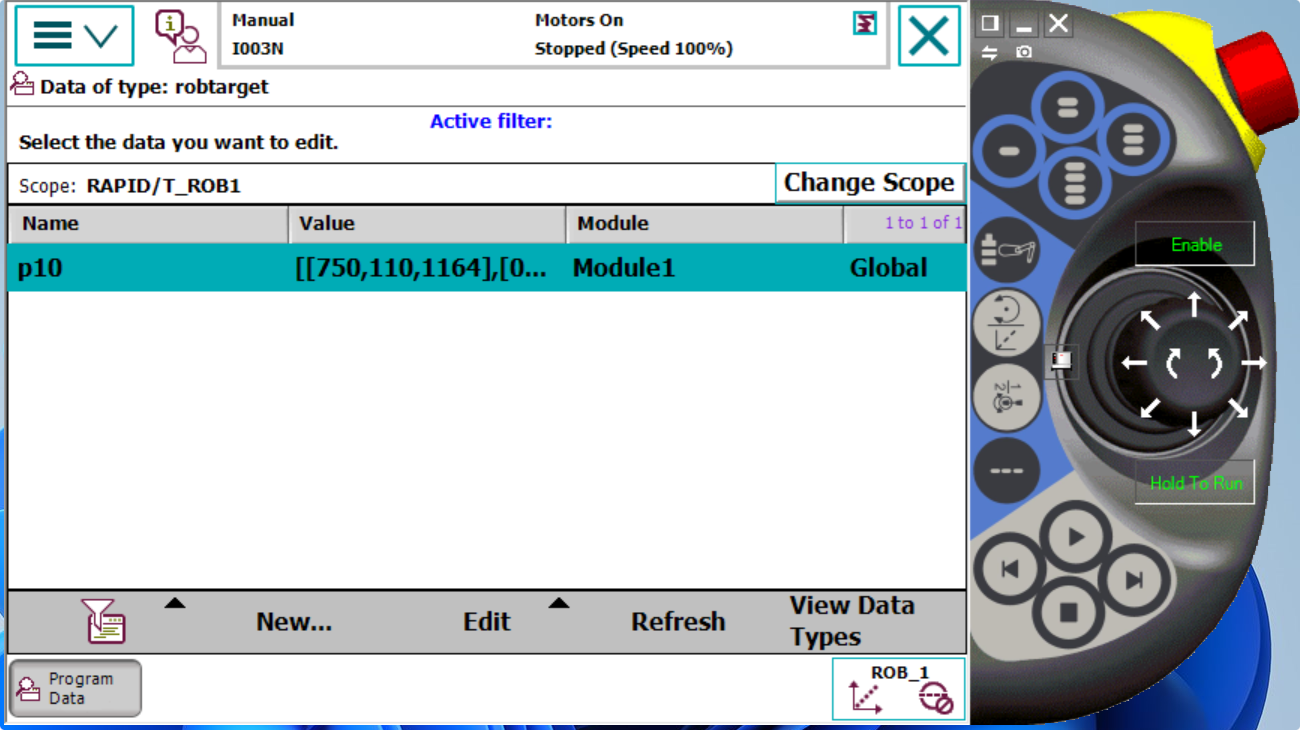
1.7 Punkti defineerimine Menüüst valitakse ‘Program Data’. Vajutatakse nuppu ‘View‘ ja valitakse ‘All Data Types‘. Valitakse ‘robtarget‘.. Vajutatakse nuppu ‘Show Data‘. Vajutatakse nuppu ‘New‘. Vajutatakse nuppu ‘OK‘. Vajutatakse nuppu ‘Edit‘. Valitakse ‘Change Value‘. Täidetakse väljad x:= 750 y:= 110 z:= 1164. Vajutatakse OK. Punkt ‘p10‘ on defineeritud.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
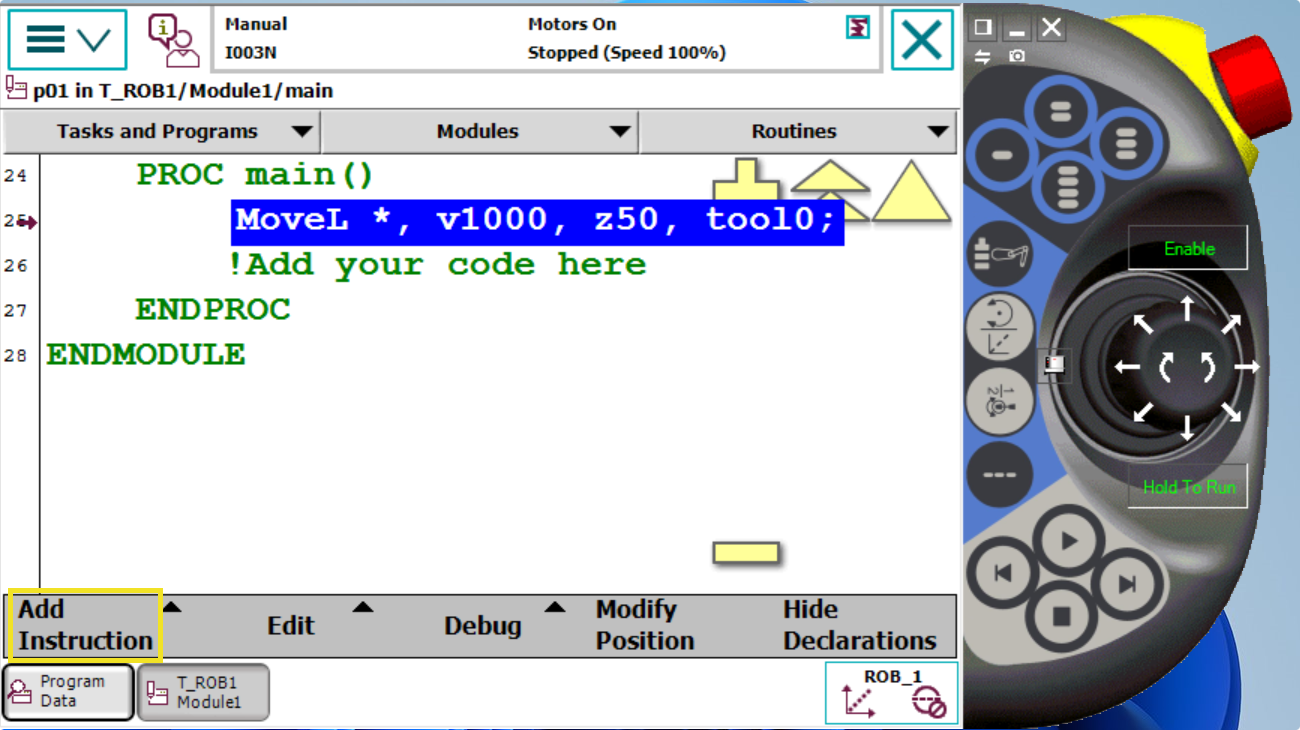
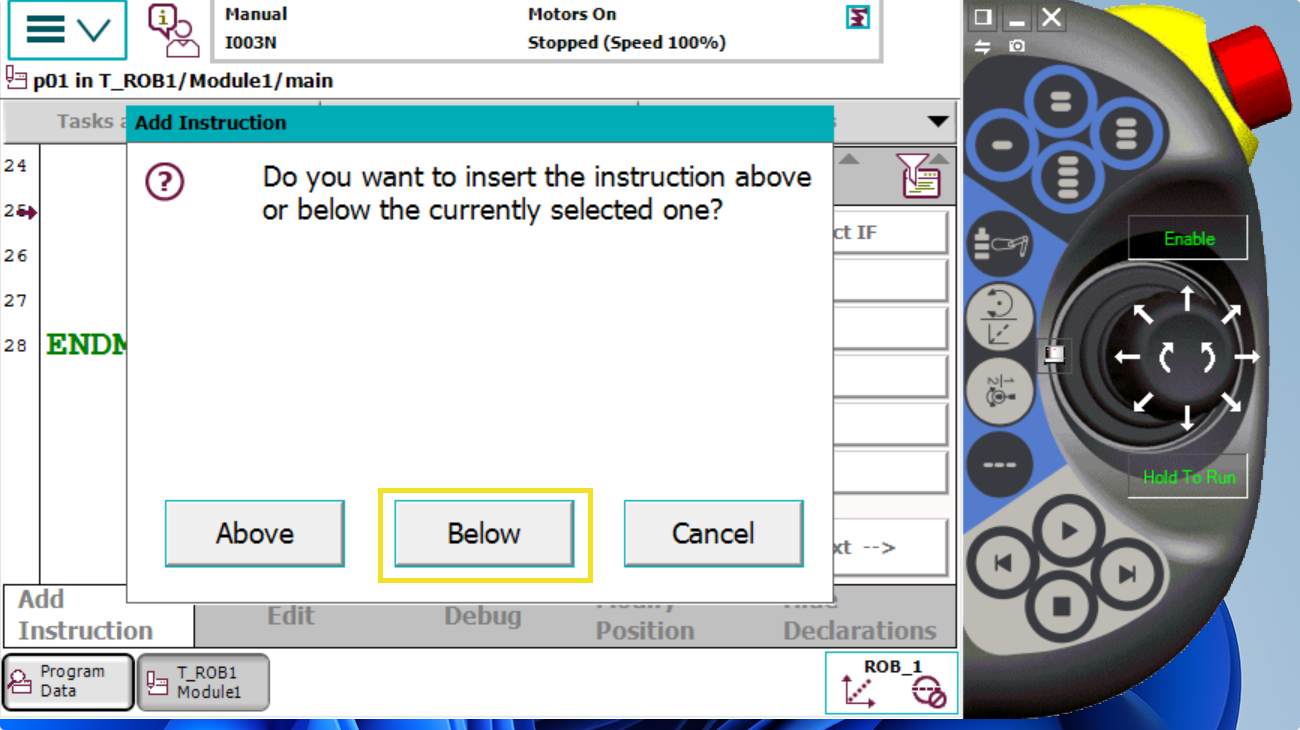
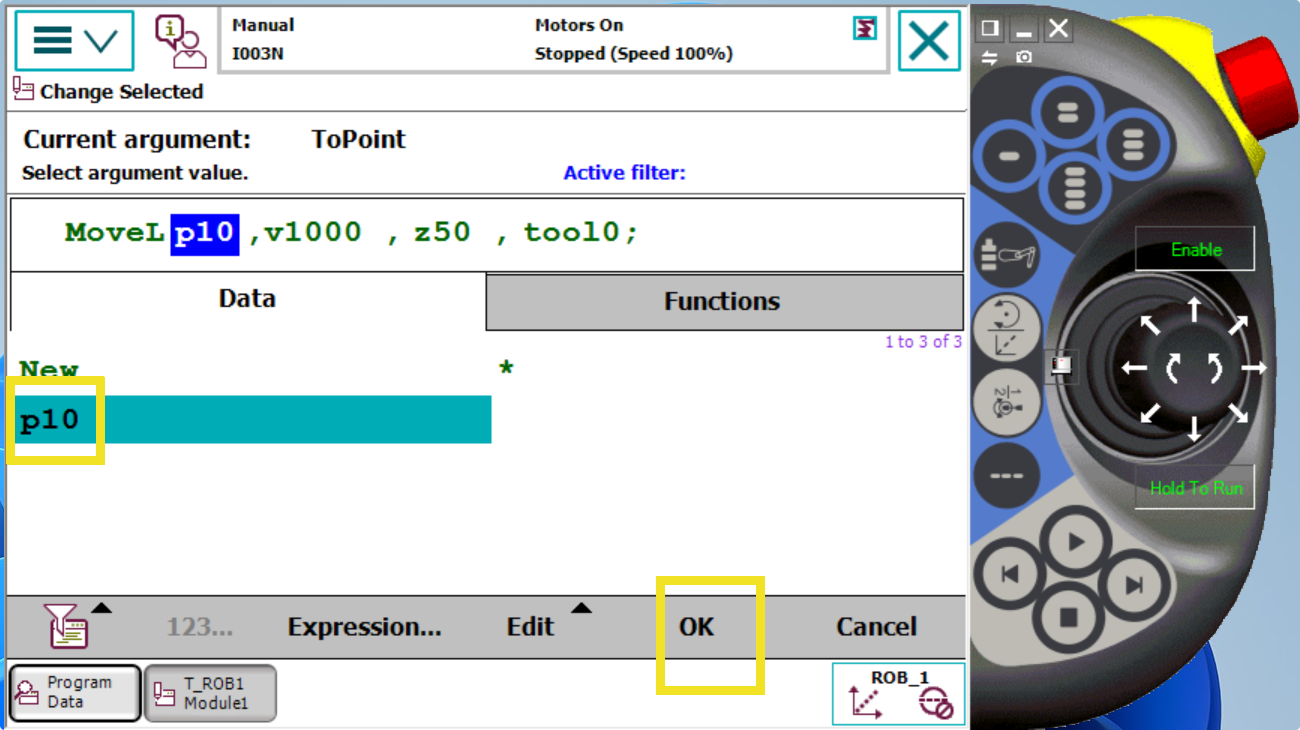
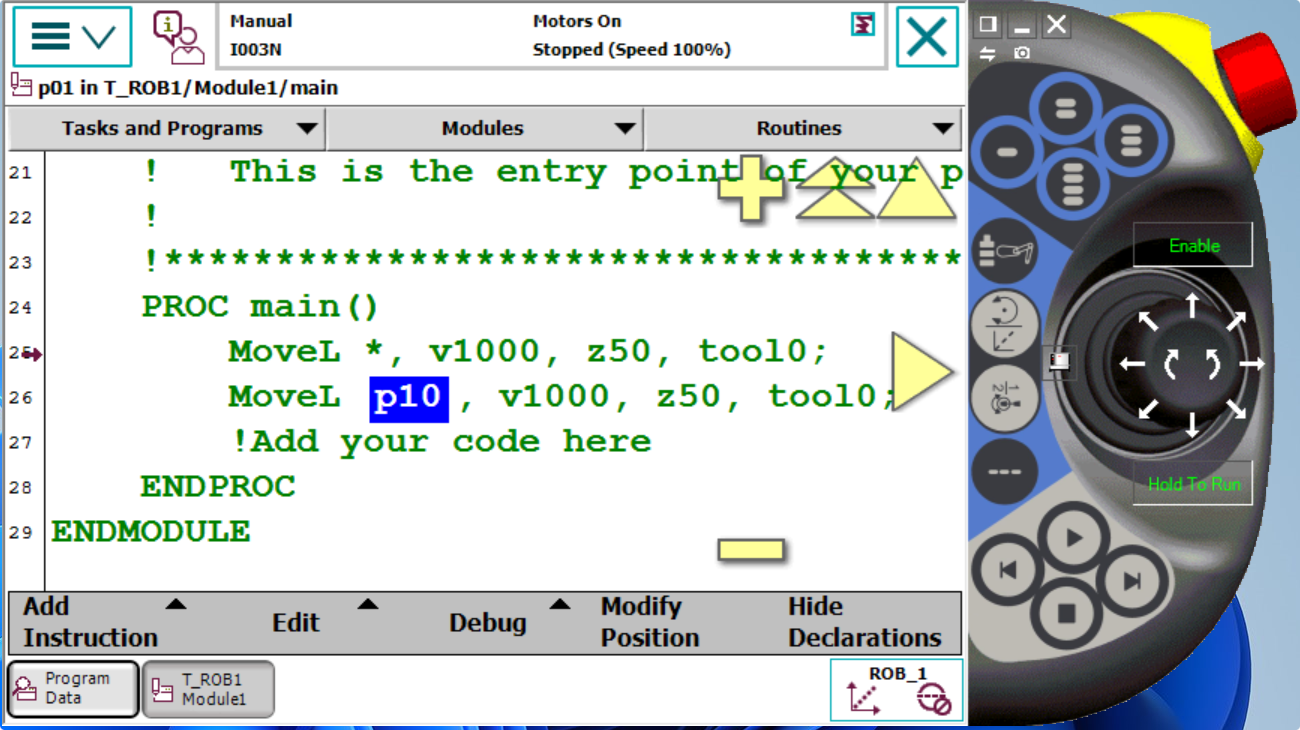
1.8. Defineeritud punkti kasutamine. Programmile ‘p01’ lisatakse rida. Avatakse programmiredaktor ja vajutatakse ‘Add Instruction’. Valitakse käsk MoveL. Valitakse ‘Below‘. Vajutatakse ‘Add Instruction‘.
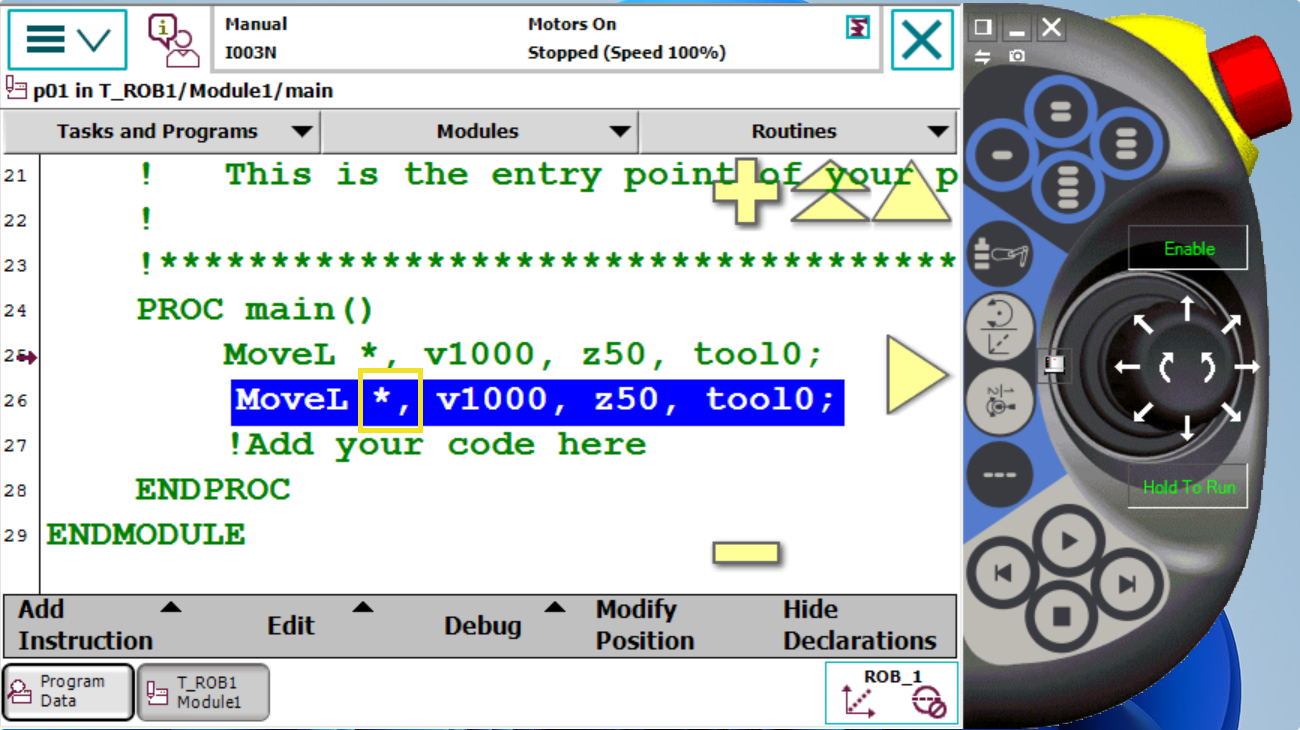
Real 26 vajutatalse tärni, seejärel tehakse samas topeltklõps. Valitakse p10 ja vajutatakse ‘OK’ Käsk on lisatud. Käivitatakse programm ‘p01’ (punkt 1.6.) Robot hakkab liikuma punktide * ja p10 vahel.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}